Download
1 / 1
10 likes | 192 Views
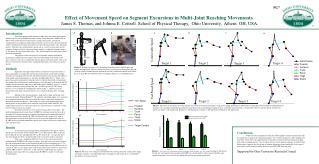
A. B. C. D. 60° Hip Flexion. Arm Length. Trunk Length. Comfortable Speed. Hip Height. Target 1. Target 2. Target 4. Target 3. Fast Paced Speed. Target 3. Target 1. Target 4. Target 2. 20.

E N D
A B C D 60° HipFlexion Arm Length TrunkLength Comfortable Speed Hip Height Target 1 Target 2 Target 4 Target 3 Fast Paced Speed Target 3 Target 1 Target 4 Target 2 20 Figure 3 The effect of movement speed on segment excursions of the forearm, humerus, trunk, pelvis, thigh, and shank are illustrated by stick figures derived from the anthropometrics and time series segment orientation data from four individual subjects performing reaching tasks to each of the target locations at comfortable (top row) and fast paced (bottom row) speeds. A) Target 1: 20° hip flexion B) Target 2: 40° hip flexion C)Target 3: 60° hip flexion D)Target 4: 80° hip flexion. 302.7 Effect of Movement Speed on Segment Excursions in Multi-Joint Reaching MovementsJames S. Thomas, and Johnna E. Cottrell. School of Physical Therapy, Ohio University, Athens OH, USA. Introduction It has been proposed that control of multi-joint movements performed at different speeds can be simplified by time scaling of joint kinematics. Hollerbach & Flash (1982) noted that interaction torques arising from Coriolis, inertial and centripetal forces complicate multi-joint movements; however, they also noted that the relative contributionsof interaction torques are speed invariant for the same kinematic pattern. Therefore one could perform a given task at a variety of movement speeds without a change in relative segment motions simply by scaling the dynamic torques by the square of ratio of movement times. This would simplify the multi-joint control problem considerably. The purpose of this research was to determine whether individuals performing reaching tasks that require some forward bending of the trunk use the same segment excursions at comfortable and fast paced movement speeds. That is do they use a movement strategy of time scaling their kinematics for reaches of various speeds. Methods Eight male and eight female subjects reached for 4 targets located in a para-sagittal plane at comfortable and fast-paced movement speeds while standing barefoot on a forceplate (40 x 60 cm). The target locations were based on the subject’s trunk length, arm length (humerus + forearm), and hip height (Fig. 1). Target 1 was placed in a position calculated so that the subject (with the elbow fully extended and the shoulder flexed 90 degrees) could, in theory; reach the target by flexing the hip 20 without any flexion of the ankle, knee, and lumbar spine. Similarly, targets 2, 3, and 4 could be reached by flexing the hips 40, 60, and 80 respectively. The subject, however, never assumed the configurations shown in Fig. 1., and was given no instructions on the limb segment geometry to use while performing these reaching tasks. Motions of the forearm humerus, trunk, pelvis, thigh, and shank, were measured using the Motion Monitor™. The segment orientation angles were measured in a counterclockwise direction as seen from the subject’s right side, starting with horizontal equal to zero degrees. The changes in segment orientation angles from initial posture to target contact were analyzed using mixed model ANOVAs. The within subject factors were movement speed (2), target location (4), and trial (3). The between subjects factor was gender. Ground reaction forces were measured using a Bertec forceplate. The peak horizontal ground reaction forces (H-GRF) for each movement trial were then determined.If segment kinematics remained unchanged in the comfortable and fast paced movement trials, then the H_GRF should scale at the square of the ratio of movement times for these trials. Paired t-tests were used to compare the ratios of H_GRF at fast-paced and comfortable speeds to the square of the ratios of movement times for these trials. Results As movement speed changed from comfortable to fast-paced, subjects had increased excursions of the forearm (M=3.1°) p<.05, humerus (M=2.1°) p<.05, pelvis (M=2.0°) p<.05, and thigh (M=5.0°) p<.05. (Fig 3A-D). As expected, there was also significant effects of target height on the excursions of all six segments. There was a significant difference between the expected and actual scaling of peak H-GRF for all 4 target locations. Averaged across all target locations, the ratio of movement times at the comfortable and fast paced conditions was 1.754. Thus, if segment excursions did not change we would expect peak H_GRF to scale by a factor of 3.07 (i.e. the square of the ratio of movement times). However, on average, peak H_GRF scaled by a factor of 1.3. The relatively small changes in segment kinematics had a large effect on scaling of peak H-GRF for reaches to each target location (Fig 4). A B Figure 1. A)Target locations were determined from the subject's trunk length, arm length, and hip height. Subjects could reach Target 3, in theory, by flexing their hips 60° (with the elbow extended and the shoulder flexed 90°) without any motion of the ankle, knee, or spine. B) An individual subject reaching for Target 3 at a comfortable pace. A B Conclusions While it has been hypothesized that the CNS simplifies control of multi-joint tasks by simple time scaling of the segment kinematics, these results confirm our earlier findings that movement speed affects the apportionment of segment excursions when performing reaching tasks from a standing posture, even to targets that necessitate minimal amounts of trunk flexion. Furthermore it appears that the change in segment kinematics from comfortable to fast-paced movements results in much smaller increases in peak H-GRF than expected. Supported by Ohio University Research Council Figure 4. The expected scaling and actual scaling of peak H-GRF for each target location are illustrated. Clearly, for each target location actual peak H-GRF was significantly less than expected had the same segment kinematics been used for the comfortable and fast-paced movement trials. Figure 2 The time series changes in orientation of the forearm, humerus, trunk, pelvis, thigh, and shank, segments of an individual subject reaching for a 60° target A) At a comfortable speed. B) At a fast-paced speed.





