Download
1 / 11
160 likes | 366 Views
LIght Detection And Ranging. LIDAR gathers data through laser light striking the surfaces of the earth and measuring the time of pulse return A LIDAR system is often capable of recording up to five (5) returns per pulse

E N D
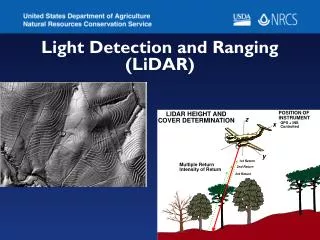
LIght Detection And Ranging • LIDAR gathers data through laser light striking the surfaces of the earth and measuring the time of pulse return • A LIDAR system is often capable of recording up to five (5) returns per pulse • LIDAR can distinguish not only the canopy and bare ground but also surfaces in between (such as a forest structure and under story
A ‘point cloud’ of multiple LIDAR returns…a topic for on-going research… estimating forest stand volume for example
The most common use for LIDAR is the creation of very high resolution DEM’s
An interesting paper: http://www.isprs.org/commission3/proceedings/papers/paper114.pdf
Why LIDAR? • Potential exists for highly accurate Elevation data sets…. • Forestry, construction, even modeling radio reception for cell towers depend on very accurate elevation data • Many areas are too large (or difficult) to manually survey, river flood plains, coastal mudflats or sediment deposits
Conceptually quite simple, a single laser beam sweeps back and forth beneath an aerial (or space) platform. As the velocity of light is a constant, the time from pulse to recording provides a very accurate measure of height
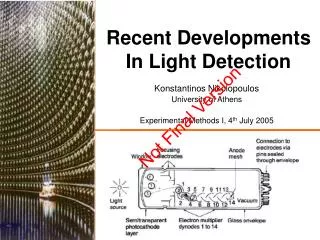
Recording the back scatter… • typically use extremely sensitive detectors called photomultiplier tubes to detect the backscattered light. • Photomultiplier tubes convert the individual quanta of light, photons, first into electric currents and then into digital numbers • The amount of light required for a photomultiplier tube to record data is very small on the order of picoamps (1 pA = 10-12 A; a 60 W light bulb draws a current of 0.5 A!).
The geometry of the platform is critical….and variable (airplanes ‘bounce’!) Accurate LIDAR data is completely dependent on being able to know, and correct for changes in platform orientation.
From the Spencer B. Gross web site…http://www.sbgmaps.com/lidar.htm • “The core of the system is the Inertial Measurement Unit (IMU)…. The IMU measures the translation and rotational dynamics of the sensor. It is entirely solid state for high reliability, containing a triad of high quality silicon accelerometers, and three low noise Dry Tuned Gyros.” • It is non-trivial to actually create a worthwhile data set.
Using LIDAR to understand the atmosphere • Differential Absorption LIDAR (DIAL) uses 2 laser pulses fired simultaneously … one wavelength of laser light is ‘normal’ and transits the atmosphere with no significant reflection or absorption • The second wavelength of laser light is absorbed by a specific gas (ozone or water vapor) in the atmosphere…
“The UV DIAL system uses five laser (or lidar) wavelengths IR and visible wavelengths both measure aerosols and clouds. Two UV wavelengths determine the profile of ozone by analyzing the absorption differences due to ozone between the two lidar returns. “ http://oea.larc.nasa.gov/PAIS/DIAL.html