Download
1 / 19
220 likes | 648 Views
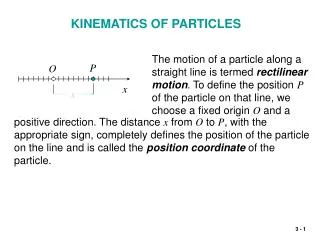
Kinematics of Particles. Kinematics is the study of motion without reference to the force which produced the motion. First, we will study the kinematics of one-dimensional motion , in which case, force and acceleration are scalars instead of vectors. Special cases.

E N D
Kinematics of Particles Kinematics is the study of motion without reference to the force which produced the motion. First, we will study the kinematics of one-dimensional motion, in which case, force and acceleration are scalars instead of vectors.
Special cases • There are certain problems where it is possible to solve the equations of motion without differential equations. These are listed below: 1) Force and acceleration are only a function of time: 2) Force and acceleration are only a function of position: 3) Force and acceleration are only a function of velocity:
(1) Acceleration only a function of time Re-arranged as: When integrated: When the starting velocity (v1) is known, the velocity at any future time t can be written as:
Likewise, velocity can be written as: Re-arranged as: When integrated: When the starting position (x1) is known, the position at any future time t can be written as:
(2) Acceleration only a function of position As stated, this equation cannot be integrated with respect to time, however we can make the useful substitution. This equation can be integrated as follows:
Case (2) is useful in solving dynamic problems because it provides a direct relationship between initial and final velocity if the intial and final positions are known. Example 1. Assume the acceleration is due to gravity alone (i.e. acceleration is constant in space), The above equation becomes: Effectively, this equation indicates that if we know the initial velocity of an object moving under the action of gravity alone, the final velocity can be determined by the distance it moved.
Example 2. Assume the object’s acceleration is due to force applied by a spring. The variable k is known as the spring constant, which is truly a “constant” only for a linear spring. For non-linear springs, the spring constant may have some dependence on x (i.e. ). In either case, the acceleration is a function of position only. In other words, the sum of the kinetic energy and the potential energy of a spring must be constant (i.e. the same at times t1 and t2 and any other time if no other non-conservative force is present). Thus if we know the length of the spring, then we can determine the velocity of the ends of the spring at any future time.
(3) Acceleration only a function of velocity This equation can be integrated with respect to time as follows: Example 3. Assume the force is due to inertial drag through a medium such as a projectile moving through air. In this example, the drag force is often given in the form: Where D is a proportionality constant known as the drag coefficient, A is the cross-sectional area of the object, ρ is the object’s density, and v is the velocity of the object.
Given the form of the inertial drag force, the equation can be re-arranged and solved for time in terms of the velocity. Interestingly, this equation predicts that provided no other forces operate on the mass, it will take an infinitely long time for the projectile to come to a stop. You might have experienced this effect when riding in a boat, and it is this effect which underlies the constant movement of solar bodies.
When acceleration is a function of position, time and velocity, the equations of motion become much more difficult to solve. Example 4. Assume the objects acceleration is due to a spring, and inertial drag through a medium. The solution to this second order differential equation, which can only be solved numerically on a computer. It cannot be solved using the methods introduced previously in cases (1-3).
Problem 1 A projectile enters a resisting medium at x= 0 with an initial velocity vo = 900 ft/s and travels 4 in. before coming to rest. Assuming that the velocity of the projectile is defined by the relation v = vo - kx, where v is expressed in ft/s and x is in feet, determine (a) the initial acceleration of the projectile, (b) the time required for the projectile to penetrate 3.9 in. into the resisting medium.
Problem 1 dv dx dx dt A projectile enters a resisting medium at x= 0 with an initial velocity vo = 900 ft/s and travels 4 in. before coming to rest. Assuming that the velocity of the projectile is defined by the relation v = vo - kx, where v is expressed in ft/s and x is in feet, determine (a) the initial acceleration of the projectile, (b) the time required for the projectile to penetrate 3.9 in. into the resisting medium. 1. Determine a(x) for a given v(x). Substitute v(x) in the formula a = vdifferentiate and obtain a(x). 2. Determine t(x) for a given v(x). Substitute v(x) in the formula v = rewrite as dt = Integrate and obtain t(x). dx v
Problem 1 Solution 4 12 dv dx v = vo - k x Determine k: 0 = 900 ft/s - k ( ft) k = 2700 s-1 Determine a(x) for a given v(x). a = v a = ( vo - k x )(- k ) (a) at x = 0 a = - kvo a = - ( 2700 s-1 )( 900 ft/s ) a = - 2.43 x 106 ft/s2
Problem 1 Solution dx dt dx dt -1 t x dx du u ( vo - k x ) k 0 0 -1 vo - k x vo k 3.9 12 -1 2700 (3.9) 2700 (900) 12 Determine t(x) for a given v(x). v = vo - k x = dt = = t = ln ( ) vo - k x vo Atx = t = ln [ 1 - ] t = 1.366 x 10-3 s
A C B Problem 2 In the position shown, collar B moves to the left with a velocity of 150 mm/s. Determine (a) the velocity of collar A, (b) the velocity of portion C of the cable, (c) the relative velocity of portion C of the cable with respect to collar B.
Problem 2 A C B In the position shown, collar B moves to the left with a velocity of 150 mm/s. Determine (a) the velocity of collar A, (b) the velocity of portion C of the cable, (c) the relative velocity of portion C of the cable with respect to collar B. 1. Dependent motion of two or more particles: 1a. Draw a sketch of the system: Select a coordinate system, indicating clearly a positive sense for each of the coordinate axes. The displacements, velocities, and accelerations have positive values in the direction of the coordinate axes. 1b. Write the equation describing the constraint: When particles are connected with a cable, its length which remains constant is the constraint.
Problem 2 A C B In the position shown, collar B moves to the left with a velocity of 150 mm/s. Determine (a) the velocity of collar A, (b) the velocity of portion C of the cable, (c) the relative velocity of portion C of the cable with respect to collar B. 1c. Differentiate the equation describing the constraint: This gives the the corresponding relations among velocities and accelerations of the various particles.
Problem 2 Solution xA A C (a) The total length of the cable: B xC xB Draw a sketch of the system. Write the equation describing the constraint. constant = 2xA + xB + (xB - xA) vB = 150 mm/s Differentiate the equation describing the constraint. 0 = vA + 2vB vB = 150 mm/s vA = - 2 vB vA = -300 mm/s vA = 300 mm/s
Problem 2 Solution 0 = 2vA + vC vC = - 2vA vC = 600 mm/s vC = vB + vC/B 600 = 150 + vC/B vC/B = 450 mm/s xA A (b) The length of the cable from the right end to an arbitrary point on portion C of the cable: C B xC constant = 2xA + xC xB vB = 150 mm/s (c) Relative velocity of portion C: