Download
1 / 35
350 likes | 499 Views
Your specifications for a stiff structure. Distributed ramp force. Fixed. Use 40 % material that can fit into this rectangle. Fixed. Point force. Stiff structure for your specifications. Your specifications for the compliant mechanism. Use 30 % material. Output deflection. Fixed. Hole.

E N D
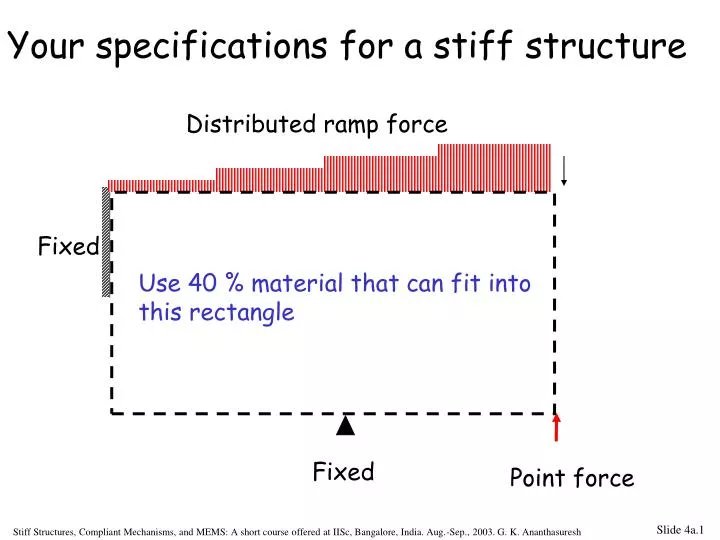
Your specifications for a stiff structure Distributed ramp force Fixed Use 40 % material that can fit into this rectangle Fixed Point force Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Stiff structure for your specifications Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Your specifications for the compliant mechanism Use 30 % material Output deflection Fixed Hole Fixed Input force Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Compliant mechanism to your specifications Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Lecture 4aDesign parameterization in structural optimization Various ways of defining design variables for size, shape, and topology optimization schemes. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Contents • Hierarchical description of the physical form of a structure • Topology • Shape • Size • Size (dimensional, parameter) optimization • Shape optimization • Topology optimization • Ground structure method • Homogenization method • Power law, and SIMP methods • Micro-structure based models • “peak” function • Level-set methods Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Hierarchical description of the physical form of a structure Topology or layout Connectivity among portions of interest force force support Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Topology or layout (contd.) Number of holes in the design domain also determine the connectivity force force support Topology or layout design Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Hierarchical description of a physical form of structure: Shape Shape design Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Hierarchical description of a physical form of structure: Size When the topology and shape are selected, one can optimize by varying size related parameters such as dimensions. = thickness Dimensional or parametric or size design Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Stiffest structure for these specifications for a given volume 30x20=600 elements 60x40=2400 Results given by PennSyn program for… 120x80=9600 Volume = 40% Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Design parameterization • In order to optimize topology (layout), shape, or size, we need to identify optimization variables. This is called the “design parameterization”. • Size optimization • Thickness, widths, lengths, radii, etc. • Shape optimization • Polynomials • Splines • Bezier curves, etc. • Topology optimization • We will discuss in detail Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Ground structure with truss elements Define a grid of joint locations and connect them in all possible ways with truss elements so that all the lements lie within the design region. A possible solution Ground structure Associated with each truss element, define a c/s area variable. This leads to N optimization variables. Each variable has lower (almost zero) and upper bounds. Kirsch, U. (1989). Optmal Topologies of Structures. Applied Mechanics Reviews 42(8):233-239. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
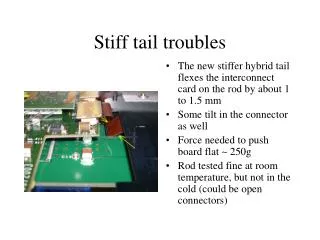
Ground structures with beam elements Overlapping beam elements are avoided because they create complications in practical realization of the designs. Realizable slopes are limited but it does not matter in most cases. Again, each element has a design variable related to its cross-section. Saxena, A., Ananthasuresh, G.K., “On an optimal property of compliant topologies,” Structural and Multidisciplinary Optimization, Vol. 19, 2000, pp. 36-49. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Continuum modeling:the homogenization-based method At each point, we need to interpolate the material between 0 and 1 in order to do optimization. q b a Three optimization variables per element: a, b, and q. Each element is imagined to be made of a composite material with microstructural voids. Bendsøe, M.P., and Kikuchi, N. (1988). Generating optimal topologies in structural design using a homogenization method. Computer Methods in Applied Mechanics and Engineering 71:197-224. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Homogenization-based method (contd.) Homogenization Homogeneous material with equivalent properties Material with microstructure Relevant homogenized properties are pre-computed and fitted to smooth polynomials for ready interpolation. Homogenized property Homogenized property Homogenized property a b q Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Another microstructure based method The original homogenization-based method used three variables to get some anisotropicy (orthotropy, in particular). But practical considerations mostly need isotropic materials. Assume isotropic (spherical inclusions) Volume fraction = Young’s modulus = Gea, H. C., 1996, Topology Optimization: A New Micro-Structural Based Design Domain Method, Computers and Structures, Vol. 61, No. 5, pp. 781 – 788. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Fictitious density method; power law model Fictitious density approach SIMP (Solid Isotropic Material with Penalty) pis the penalty parameter to push densitiesto black (1) and white (0). For optimization, there will be as many as the number of elements in the discretized model. Rozvany, G.I.N. , Zhou, M., and Gollub, M. (1989). Continuum Type Optimality Criteria Methods for Large Finite Element Systems with a Displacement Connstraint, Part 1. Structural Optimization 1:47-72. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Penalty parameter in the SIMP method: some justification Hashin-Shtrikman bounds Therefore, Bendsøe, M.P. and Sigmund, O., “Material Interpolation Schemes in Topology Optimization,” Archives in Applied Mechanics, Vol. 69, (9-10), 1999, pp. 635-654. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Microstructure for intermediate densities Bendsøe, M.P. and Sigmund, O., “Material Interpolation Schemes in Topology Optimization,” Archives in Applied Mechanics, Vol. 69, (9-10), 1999, pp. 635-654. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Multiple-material interpolation For two-materials, in the SIMP method, two variables are needed. Alternatively…with just one variable, many materials can be interpolated. 0 0.5 1 0 0.5 1 0 0.5 1 Yin, L. and Ananthasuresh, G.K., “Topology Optimization of Compliant Mechanisms with Multiple Materials Using a Peak Function Material Interpolation Scheme,” Structural and Multidisciplinary Optimization, Vol. 23, No. 1, 2001, pp. 49-62. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Advantages of the peak function based probabilistic material interpolation Begin with large s’s and gradually decrease to get peaks eventually. No bounds on the variables! Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Peak function method for embedding objects G Connecting structure Embedded objects Traction forces on GT Fixed boundary W Contours (level set curves) Z. Qian and G. K. Ananthasuresh, “Optimal Embedding in Topology Optimization,” CD-ROM proc. of the IDETC-2002, Montreal, CA, Sep. 29-Oct. 2, 2002, paper #DAC-34148. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Level-set method A very powerful method for topology optimization. The boundary defined as the level set of a surface defined on the domain of interest. “Zero” level set curve defines the boundary, while positive surface values define the interior of the region. Interior Boundary Exterior M. Y. Wang, X. M. Wang, and D. M. Guo, “A Level Set Method for Structural Topology Optimization,” Computer Methods in Applied Mechanics and Engineering, 192 (1), pp. 227-246, 2003. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Level set method for multiple materials 8 7 3 4 1 6 2 5 Multiple materials can be dealt with more level set surfaces. With level set surfaces, materials can be exclusively chosen. 4 3 1 2 Three level sets and eight materials Two level sets and four materials M. Y. Wang, personal communication, 2003. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Main points • Topology, shape, and size provide a hierarchical description of the geometry of a structure. • Different “smooth” interpolations techniques for topology optimization • SIMP is widely used • Peak function based probabilistic interpolation method can easily handle multiple materials with few variables • Level-set method provides a larger design space Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Your specifications for a stiff structure Distributed ramp force Fixed Use 40 % material that can fit into this rectangle Fixed Point force Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Stiff structure for your specifications Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Optimal synthesis solution Solved with 96x48 = 4608 variables in the optimization problem. Actual time taken on this laptop = ~10 minutes Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Designs with different mesh sizes 24x12 = 288 elements 72x36 = 2592 elements 48x24 = 1152 elements 96x48 = 4608 elements Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Your specifications for the compliant mechanism Use 30 % material Output deflection Fixed Hole Fixed Input force Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Compliant mechanism to your specifications Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
A rigid-body mechanism (if you want) Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Optimal compliant mechanism to your specifications Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh
Compliant designs for different mesh sizes Medium mesh Rough mesh Fine mesh Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh