Download
1 / 10
100 likes | 209 Views
Homework Due March 3, before 3:30 pm. Based on readings in the syllabus All questions carry equal points. Problem 1: Learn more about DCSP Representation. Sensor DCSP. Each sensor has three 120 degree sectors, numbered 0, 1 or 2 as shown on the previous slide

E N D
HomeworkDue March 3, before 3:30 pm Based on readings in the syllabus All questions carry equal points
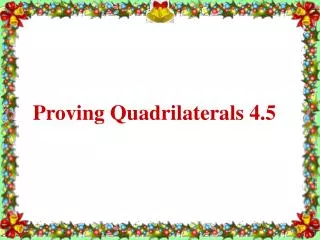
Sensor DCSP • Each sensor has three 120 degree sectors, numbered 0, 1 or 2 as shown on the previous slide • Each sensor is controlled by one agent • The agent decides which of the sensor’s sectors to activate or to go into rotate mode • Rotate mode causes the sensor to repeatedly scan the three sectors • At any point in time, a sensor must have either one sector active or be in rotate mode, NOT BOTH • Tracking a target requires at least three sectors to be active from three different sensors (more than three does not hurt the tracking of the target) • A sensor cannot contribute to tracking by going into rotate mode • DON’T WORRY ABOUT WEIRD GEOMETRY ON THE NEXT PROBLEM or STRANGE BOUNDARY CONDITIONS
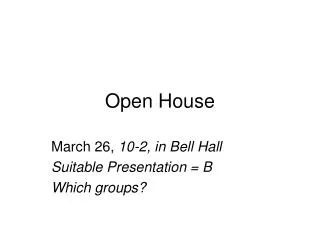
1 1 1 1 1 1 0 0 0 0 0 0 2 2 2 2 2 2 Question 1 • (a) Represent the problem1 as DCSP • Sensor agents as variables • Values = 3 sectors, rotate-mode • What are the binary constraints? • (b) What is a solution if Target1 is seen • by Agent A’s sector 0 in Problem1? • Represent as assignment of DCSP values for variables • How many sensors allocated to Target1? A B E Target2 Target1 G C D Problem 1 Parts a, b Addition For Part c,d
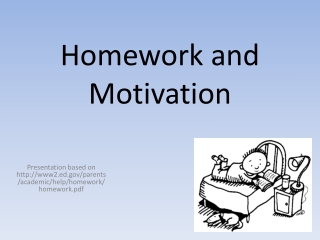
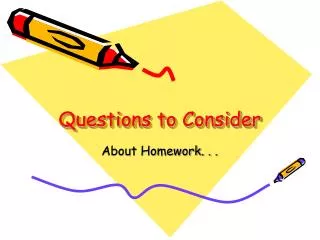
1 1 1 1 1 1 0 0 0 0 0 0 2 2 2 2 2 2 Question 1 • (c) If Addition’s extra sensors and target are also present • Solve the DCSP again (Using the same representation you used in Part a, but with • Sensors E and G added in) • Report on the results • Should the problem be solvable in principle? • (d) Represent the problem in part c as • a DCOP rather than a DCSP • Report on the possible optima • solutions to this DCOP • Is there any difference from the results • Obtained via DCSP? A B E Target2 Target1 G C D Problem 1 Parts a, b Addition For Part c,d
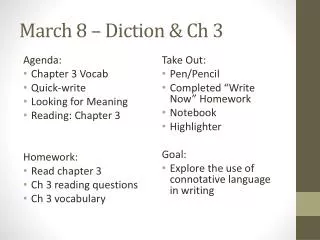
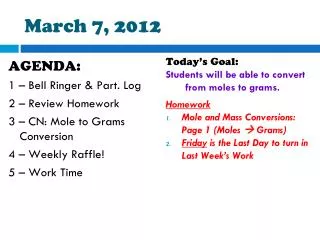
26 3200 80 3420 4000 6 6 6 6 6 2 4 3 0 1 4 5 3 2 6 Problem 2: RMTDP 6 The numbers above each node are referring to RMTDP evaluations of nodes just one level above the leaf nodes.
6 2 4 Node expanded • As explained in class, numbers such as 3420 are obtained by taking the sum of the max of each component • 3420 came about from 84+3300+36 • For how these numbers (84, 3300, 36) are computed please refer to the paper 3420
Question 2 • Which nodes can be pruned and why? Please explain. • (Hint: At least one node could be pruned).
Problem 3: SharedPlans • One criticism of SharedPlans that Prof. Grosz agrees with is that it does not take into account uncertainties in the environment. • Suppose you were to redesign axiom A7 relating to intends.that in the sharedplans theory, to enable reasoning about uncertainties as well as cost (not just cost as presently done) • Please write down your new Axiom, A7-new.
Problem 4: Game theory • Prof. Embat has suggested the following theorem: • Theorem 1: Suppose (P1*, P2*) in a stochastic game are in Nash equilibrium, then for all other policies P1: v1(s, P1*, P2*) + v2(s, P1*, P2*) >= v1(s, P1, P2*) + v2(s, P1, P2*) (a) Prove or disprove Prof. Embat’s theorem. (b) If you disprove the theorem, please explain if there are special classes of stochastic games where the theorem holds OR If you prove the theorem, please give an example illustrating the concept of the theorem.