Download
1 / 1

E N D
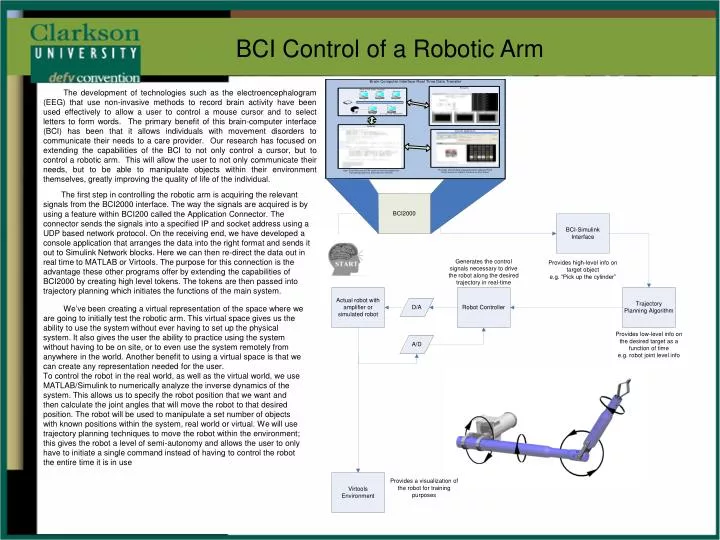
The development of technologies such as the electroencephalogram (EEG) that use non-invasive methods to record brain activity have been used effectively to allow a user to control a mouse cursor and to select letters to form words. The primary benefit of this brain-computer interface (BCI) has been that it allows individuals with movement disorders to communicate their needs to a care provider. Our research has focused on extending the capabilities of the BCI to not only control a cursor, but to control a robotic arm. This will allow the user to not only communicate their needs, but to be able to manipulate objects within their environment themselves, greatly improving the quality of life of the individual. BCI Control of a Robotic Arm • The first step in controlling the robotic arm is acquiring the relevant signals from the BCI2000 interface. The way the signals are acquired is by using a feature within BCI200 called the Application Connector. The connector sends the signals into a specified IP and socket address using a UDP based network protocol. On the receiving end, we have developed a console application that arranges the data into the right format and sends it out to Simulink Network blocks. Here we can then re-direct the data out in real time to MATLAB or Virtools. The purpose for this connection is the advantage these other programs offer by extending the capabilities of BCI2000 by creating high level tokens. The tokens are then passed into trajectory planning which initiates the functions of the main system. We’ve been creating a virtual representation of the space where we are going to initially test the robotic arm. This virtual space gives us the ability to use the system without ever having to set up the physical system. It also gives the user the ability to practice using the system without having to be on site, or to even use the system remotely from anywhere in the world. Another benefit to using a virtual space is that we can create any representation needed for the user. To control the robot in the real world, as well as the virtual world, we use MATLAB/Simulink to numerically analyze the inverse dynamics of the system. This allows us to specify the robot position that we want and then calculate the joint angles that will move the robot to that desired position. The robot will be used to manipulate a set number of objects with known positions within the system, real world or virtual. We will use trajectory planning techniques to move the robot within the environment; this gives the robot a level of semi-autonomy and allows the user to only have to initiate a single command instead of having to control the robot the entire time it is in use