Download

1 / 15
210 likes | 628 Views
Tutorial 7 SVD Total Least Squares. Singular Value Decomposition. We already know that the eigenvectors of a matrix A form a convenient basis for working with A . However, for rectangular matrices A (m x n), dim( A x ) ≠ dim( x ) and the concept of eigenvectors doesn’t exist.

E N D
Singular Value Decomposition We already know that the eigenvectors of a matrix A form a convenient basis for working with A. However, for rectangular matrices A (m x n), dim(Ax) ≠ dim(x) and the concept of eigenvectors doesn’t exist. Yet, ATA (n x n) is symmetric real matrix (A is real) and therefore, there is an orthonormal basis of eigenvectors {uK}. Consider the vectors {vK} They are also orthonormal, since:
Singular Value Decomposition Since ATA is positive semidefinite, its {λk≥0}. Define the singular values of A as and order them in a non-increasing order: Motivation: One can see, that if A itself square and symmetric, than {uk, σk} are the set of its own eigenvectors and eigenvalues. For a general matrix A, assume {σ1 ≥ σ2 ≥… σR >0= σr+1 = σr+2 =…= σn }.
Singular Value Decomposition Now we can write:
SVD: Example Let us find SVD for the matrix In order to find V, we are calculating eigenvectors of ATA: (5-λ)2-9=0;
SVD: Example The corresponding eigenvectors are found by:
SVD: Example Now, we obtain the U and Σ : A=VΣUT:
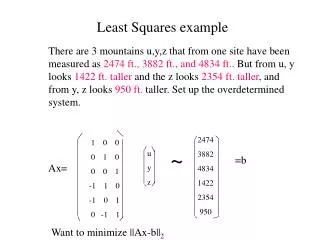
Total Least Squares Consider again (see Tutorial 4) the set of data points , and the problem of linear approximation of this set: In the Least Squares (LS) approach, we defined a set of equations: If , then the LS solution minimizes the sum of squared errors:
Total Least Squares This approach assumes that in the set of points the values of bi are measured with errors while the values of ti are exact, as demonstrated on the figure.
Total Least Squares Assume, that we rewrite the line equation in the form: . Then the corresponding LS equation becomes: Corresponding to minimization of Which means noise in ti instead of bi, and this generally leads to different solution.
Illustration Consider the following Matlab code: % Create the data x=(0:0.01:2)'; y=0.5*x+4; xn=x+randn(201,1)*0.3; yn=y+randn(201,1)*0.3; figure(1); clf; plot(x,y,'r'); hold on; grid on; plot(xn,yn,'+'); % LS - version 1 - horizontal is fixed A=[ones(201,1),xn]; b=yn; param=inv(A'*A)*A'*b; plot(xn,A*param,'g'); % LS - version 2 - vertical is fixed C=[ones(201,1),yn]; t=xn; param=inv(C'*C)*C'*t; plot(C*param,yn,'b');
TLS To solve the problem with the noise along both ti and bi, we rewrite the line equation as: where Now we can write: The exact solution of this system is possible if ti, bi lie on the same line, in this case rank(A)=1. This formulation is symmetric relatively to t and b.
TLS The rank of A is 2 since the points are noisy and do not lie on the same line. SVD factorization, and zeroing of the second singular value allow to construct the matrix A1, closest to A with rank(A1)=1.
TLS The geometric interpretation of the TLS method is finding a constant a and a set of points , such that the points lie closest in the L2 to the data set :
Total Least Squares xnM=mean(xn); ynM=mean(yn); A=[xn-xnM,yn-ynM]; [U,D,V]=svd(A); D(2,2)=0; Anew=U*D*V'; plot(Anew(:,1)+xnM; Anew(:,2)+ynM,‘r');