Download
1 / 28
290 likes | 454 Views
Robust Object Segmentation Using Adaptive Thresholding. Xiaxi Huang and Nikolaos V. Boulgouris. International Conference on Image Processing 2007 . Outline. Introduction Proposed algorithm Experimental results Conclusions. Introduction (1/2).

E N D
Robust Object SegmentationUsing Adaptive Thresholding Xiaxi Huang and Nikolaos V. Boulgouris International Conference on Image Processing 2007
Outline • Introduction • Proposed algorithm • Experimental results • Conclusions
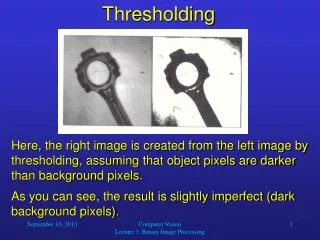
Introduction(1/2) • The extraction of moving objects from video sequences is important!! • Object detection methods • SGM ( Single Guassian Model ) • MGM ( Mixed Guassian Model ) • BG substaction combined color and edge information. (Aug. 2000) Serious drawbacks Poor performance for indoor shadow, light reflection, and high similarity of FG and BG.
Introduction(2/2) • Proposed algorithm • Adaptive thresholding detection • Shadow removal method
Proposed AlgorithmProcedures Of Algorithm Next Frame Updating BG Image Background Substraction Estimate FG Areas Initial Mask Estimate BG Areas Final Object Map Confidence Map From Detection Of RGB Post- processing Shadow Removal Minimum Of The Confidence Maps Maximum Of The Confidence Maps Confidence Map From Detection Of Edge FG Map (Object and Shadows) Edge Map (Boundary Of objects) Combined Confidence Map Hysteresis Thresholding
Proposed AlgorithmBackground Updating • Why? • In many background substraction method update all pixels in a frame. • A serious drawback • To avoid this condition Misclassfied a stop moving object.
Proposed AlgorithmInitial Block-size Mask(1/5) • Roughly determine the foreground areas. • Lower threshold • Calculate average different between the current frame and background frame in a block • Threshold it with T
Proposed AlgorithmInitial Block-size Mask(2/5) • Divide the blocks with larger difference which are assumed to contain foreground pixels into smaller size • Apply a higher threshold and detect sub-blocks
Proposed AlgorithmInitial Block-size Mask(3/5) The block with larger difference Using a higher threshold …
Proposed AlgorithmInitial Block-size Mask(4/5) • How to get a foreground blocks map? • Median filter • Edge pixels of the objects might be lost • Apply two initial block-size, and combine their foreground map
Proposed AlgorithmColor Change Detection With Adaptive Threshold(1/2) • Adaptive threshold • D : difference frame ( D = | I - B|) Local mean value in the difference frame Local variance in the difference frame Local variance in the current frame
Proposed AlgorithmColor Change Detection With Adaptive Threshold(2/2) • Get a threshold T by setting k1, k2 • Create confidence maps in three color channels respectively • Maximum the confidence map CMapcolor
Proposed AlgorithmEdge Detection(1/2) • In order to - • Extraction of the foreground • Removal of shadow • Compute edge magnitude • Gx and Gy are the horizontal and vertical difference in the difference frame D. • Sobel mask
Proposed AlgorithmCombination(1/3) • Combine two confidence maps. • Estimate foreground area • Maximum the confidence map • Estimate background area • Minimum the confidence map
Proposed AlgorithmCombination(2/3) • Combination
Proposed AlgorithmCombination(3/3) Fig. (a) Original image, (b) Confidence map Of RGB change Detection with adaptive threshold, (c) Confidence map of Sobel edge detection, (d) Combined confidence Map. (a) (b) (d) (c)
Proposed AlgorithmHysteresis thresholding • Remove false positive • Set two thresholds T0, T1 ; T1/T0 is about 2 or 3 • C(x) > T1 : High confidence region • T0 < C(x) < T1 : Check neighbors Hysteresis thresholding
Proposed AlgorithmShadow Removal And Post-Processing(1/4) • Indoor environment • Soft colored illumination, light-reflect floor, shadow • Hard to distinguish shadows from objects by using color information. • How to solve this problem? • Combine FG and edge confidence map
Proposed AlgorithmShadow Removal And Post-Processing(2/4) • Apply hysteresis thresholding to edge confidence map • Set bounding boxes • Remove pixels out of bounding boxes
Proposed AlgorithmShadow Removal And Post-Processing(3/4) Fig. (a) Foreground map before shadow removal, (b) Hysteresis thresholding result of edge confidence Map, (c) Foreground map after shadow removal, (d) Binary map of extracted objects. (b) (a) (c) (d)
Proposed AlgorithmShadow Removal And Post-Processing(4/4) • Some temporal filters of offline detection • To achieve above- Eliminate spurious points Retrieve missed FG pixels
Experimental Results Fig. (a) Origin image, (b) Foreground maps created by MGM plus HSV method, (c) Foreground maps created by mixture Gaussian Model, (d) Foreground maps created by proposed algori- thm. (b) (a) (c) (d)
Experimental Results Fig. (a) Origin image, (b) Foreground maps created by MGM plus HSV method, (c) Foreground maps created by mixture Gaussian Model, (d) Foreground maps created by proposed algori- thm. (b) (a) (c) (d)
Experimental Results Fig. (a) Origin image, (b) Foreground maps created by MGM plus HSV method, (c) Foreground maps created by mixture Gaussian Model, (d) Foreground maps created by proposed algori- thm. (b) (a) (c) (d)
Experimental Results Fig. (a) Origin image, (b) Foreground maps created by MGM plus HSV method, (c) Foreground maps created by mixture Gaussian Model, (d) Foreground maps created by proposed algori- thm. (b) (a) (c) (d)
Conclusions • Compared with the popular MGM object segmentation method and the HSV shadow removal method, proposed method achieves more robust performance • Considering that the proposed algorithm does not involve future frames, it can be used in real-time processing applications. • Furthermore, if it is used offline, a temporal filter can be applied to further improve the performance of the algorithm.