Download
1 / 73
1.3k likes | 2.53k Views
17. SECOND-ORDER DIFFERENTIAL EQUATIONS. SECOND-ORDER DIFFERENTIAL EQUATIONS. 17.2 Nonhomogeneous Linear Equations. In this section, we will learn how to solve: Second-order nonhomogeneous linear differential equations with constant coefficients. NONHOMOGENEOUS LNR. EQNS. Equation 1.

E N D
17 SECOND-ORDER DIFFERENTIAL EQUATIONS
SECOND-ORDER DIFFERENTIAL EQUATIONS 17.2 Nonhomogeneous Linear Equations • In this section, we will learn how to solve: • Second-order nonhomogeneous linear • differential equations with constant coefficients.
NONHOMOGENEOUS LNR. EQNS. Equation 1 • Second-order nonhomogeneous linear differential equations with constant coefficients are equations of the form ay’’ + by’ + cy = G(x) • where: • a, b, and c are constants. • G is a continuous function.
COMPLEMENTARY EQUATION Equation 2 • The related homogeneous equation ay’’ + by’ + cy = 0is called the complementary equation. • It plays an important role in the solution of the original nonhomogeneous equation 1.
NONHOMOGENEOUS LNR. EQNS. Theorem 3 • The general solution of the nonhomogeneous differential equation 1 can be written as y(x) = yp(x) + yc(x) • where: • yp is a particular solution of Equation 1. • yc is the general solution of Equation 2.
NONHOMOGENEOUS LNR. EQNS. Proof • All we have to do is verify that, if y is any solution of Equation 1, then y – yp is a solution of the complementary Equation 2. • Indeed, a(y – yp)’’ + b(y – yp)’ + c(y – yp) = ay’’ – ayp’’ + by’ – byp’ + cy – cyp= (ay’’ + by’ + cy) – (ayp’’ + byp’ + cyp) = g(x) – g(x) = 0
NONHOMOGENEOUS LNR. EQNS. • We know from Section 17.1 how to solve the complementary equation. • Recall that the solution is: yc = c1y1 + c2y2 where y1 and y2 are linearly independent solutions of Equation 2.
NONHOMOGENEOUS LNR. EQNS. • Thus, Theorem 3 says that: • We know the general solution of the nonhomogeneous equation as soon as we know a particular solution yp.
METHODS TO FIND PARTICULAR SOLUTION • There are two methods for finding a particular solution: • The method of undetermined coefficients is straightforward, but works only for a restricted class of functions G. • The method of variation of parameters works for every function G, but is usually more difficult to apply in practice.
UNDETERMINED COEFFICIENTS • We first illustrate the method of undetermined coefficients for the equation • ay’’ + by’ + cy = G(x) • where G(x) is a polynomial.
UNDETERMINED COEFFICIENTS • It is reasonable to guess that there is a particular solution yp that is a polynomial of the same degree as G: • If y is a polynomial, then ay’’ + by’ + cyis also a polynomial.
UNDETERMINED COEFFICIENTS • Thus, we substitute yp(x) = a polynomial (of the same degree as G) into the differential equation and determine the coefficients.
UNDETERMINED COEFFICIENTS Example 1 • Solve the equation y’’ + y’ – 2y = x2 • The auxiliary equation of y’’ + y’ – 2y = 0 is: r2 + r – 2 = (r – 1)(r + 2) = 0 with roots r = 1, –2. • So, the solution of the complementary equation is: yc = c1ex + c2e–2x
UNDETERMINED COEFFICIENTS Example 1 • Since G(x) = x2 is a polynomial of degree 2, we seek a particular solution of the form • yp(x) = Ax2 + Bx + C • Then, • yp’ = 2Ax + B • yp’’ = 2A
UNDETERMINED COEFFICIENTS Example 1 • So, substituting into the given differential equation, we have: • (2A) + (2Ax +B) – 2(Ax2 + Bx +C) = x2 • or • –2Ax2 + (2A – 2B)x + (2A +B – 2C) = x2
UNDETERMINED COEFFICIENTS Example 1 • Polynomials are equal when their coefficients are equal. • Thus, –2A = 1 2A – 2B = 0 2A + B – 2C = 0 • The solution of this system of equations is: A = –½ B = –½ C = –¾
UNDETERMINED COEFFICIENTS Example 1 • A particular solution, therefore, is: yp(x) = –½x2 –½x – ¾ • By Theorem 3, the general solution is: y = yc + yp = c1ex + c2e-2x – ½x2 – ½x – ¾
UNDETERMINED COEFFICIENTS • Suppose G(x) (right side of Equation 1) is of the form Cekx, where C and k are constants. • Then, we take as a trial solution a function of the same form, yp(x) = Aekx. • This is because the derivatives of ekxare constant multiples of ekx.
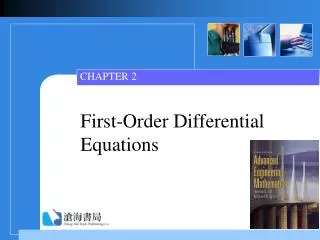
UNDETERMINED COEFFICIENTS • The figure shows four solutions of the differential equation in Example 1 in terms of: • The particular solution yp • The functions f(x) = ex and g(x) = e–2x
UNDETERMINED COEFFICIENTS Example 2 • Solve y’’ + 4y = e3x • The auxiliary equation is: r2 + 4 = 0 with roots ±2i. • So, the solution of the complementary equation is: yc(x) = c1 cos 2x + c2 sin 2x
UNDETERMINED COEFFICIENTS Example 2 • For a particular solution, we try: yp(x) = Ae3x • Then, • yp’ = 3Ae3x • yp’’ = 9Ae3x
UNDETERMINED COEFFICIENTS Example 2 • Substituting into the differential equation, we have: • 9Ae3x + 4(Ae3x) = e3x • So, 13Ae3x = e3xand A = 1/13
UNDETERMINED COEFFICIENTS Example 2 • Thus, a particular solution is: • yp(x) = 1/13 e3x • The general solution is: • y(x) = c1 cos 2x + c2 sin 2x + 1/13 e3x
UNDETERMINED COEFFICIENTS • Suppose G(x) is either C cos kx or C sin kx. • Then, because of the rules for differentiating the sine and cosine functions, we take as a trial particular solution a function of the form yp(x) = A cos kx + B sin kx
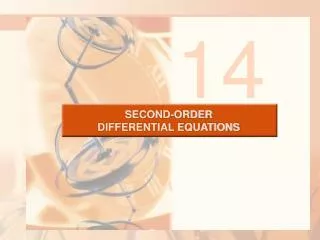
UNDETERMINED COEFFICIENTS • The figure shows solutions of the differential equation in Example 2 in terms of yp and the functions f(x) = cos 2x and g(x) = sin 2x.
UNDETERMINED COEFFICIENTS • Notice that: • All solutions approach ∞as x→ ∞. • All solutions (except yp) resemble sine functions when x is negative.
UNDETERMINED COEFFICIENTS Example 3 • Solve y’’ + y’ – 2y = sin x • We try a particular solutionyp(x) = A cos x + B sin x • Then, yp’ = –A sin x +B cos x yp’’ = –A cos x – B sin x
UNDETERMINED COEFFICIENTS Example 3 • So, substitution in the differential equation gives: (–A cos x – B sin x) + (–A sin x +B cos x) – 2(A cos x +B sin x) = sin x • or • (–3A +B) cos x + (–A – 3B) sin x = sin x
UNDETERMINED COEFFICIENTS Example 3 • This is true if: • –3A + B = 0 and –A – 3B = 1 • The solution of this system is: A = –1/10 B = –3/10 • So, a particular solution is: yp(x) = –1/10 cos x – 3/10 sin x
UNDETERMINED COEFFICIENTS Example 3 • In Example 1, we determined that the solution of the complementary equation is: • yc = c1ex + c2e–2x • So, the general solution of the given equation is: y(x) = c1ex + c2e–2x – 1/10 (cos x – 3 sin x)
UNDETERMINED COEFFICIENTS • If G(x) is a product of functions of the preceding types, we take the trial solution to be a product of functions of the same type. • For instance, in solving the differential equation y’’ + 2y’ + 4y =x cos 3x we could try yp(x) = (Ax +B) cos 3x + (Cx +D) sin 3x
UNDETERMINED COEFFICIENTS • If G(x) is a sum of functions of these types, we use the principle of superposition, which says that: • If yp1 and yp2 are solutions of ay’’ + by’ + cy =G1(x) ay’’ + by’ + cy =G2(x)respectively, then yp1 + yp2 is a solution of ay’’ + by’ + cy =G1(x) + G2(x)
UNDETERMINED COEFFICIENTS Example 4 • Solve y’’ – 4y =xex + cos 2x • The auxiliary equation is: r2 – 4 = 0 with roots ±2. • So, the solution of the complementary equation is: yc(x) = c1e2x +c2e–2x
UNDETERMINED COEFFICIENTS Example 4 • For the equation y’’ – 4y = xex, we try: • yp1(x) = (Ax +B)ex • Then, • y’p1= (Ax +A + B)ex • y’’p1= (Ax + 2A + B)ex
UNDETERMINED COEFFICIENTS Example 4 • So, substitution in the equation gives: • (Ax + 2A +B)ex – 4(Ax +B)ex =xex • or • (–3Ax + 2A – 3B)ex = xex
UNDETERMINED COEFFICIENTS Example 4 • Thus, –3A = 1 and 2A – 3B = 0 • So, A = –⅓, B = –2/9, and yp1(x) = (–⅓x – 2/9)ex
UNDETERMINED COEFFICIENTS Example 4 • For the equation y’’ – 4y = cos 2x, we try:yp2(x) = C cos 2x +D sin 2x • Substitution gives: –4C cos 2x – 4D sin 2x – 4(C cos 2x +D sin 2x) = cos 2x or – 8C cos 2x – 8D sin 2x = cos 2x
UNDETERMINED COEFFICIENTS Example 4 • Thus, –8C = 1, –8D = 0, andyp2(x) = –1/8 cos 2x • By the superposition principle, the general solution is: y =yc +yp1 + yp2 = c1e2x +c2e-2x– (1/3 x + 2/9)ex–1/8 cos 2x
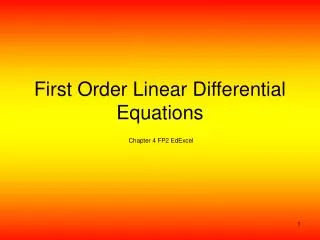
UNDETERMINED COEFFICIENTS • Here, we show the particular solution yp = yp1 + yp2 of the differential equation in Example 4. • The other solutions are given in terms of f(x) = e2xand g(x) = e–2x.
UNDETERMINED COEFFICIENTS • Finally, we note that the recommended trial solution yp sometimes turns out to be a solution of the complementary equation. • So, it can’t be a solution of the nonhomogeneous equation. • In such cases, we multiply the recommended trial solution by x (or by x2 if necessary) so that no term in yp(x) is a solution of the complementary equation.
UNDETERMINED COEFFICIENTS Example 5 • Solve y’’ + y = sin x • The auxiliary equation is: r2 + 1 = 0 with roots ±i. • So, the solution of the complementary equation is: yc(x) = c1 cos x + c2 sin x
UNDETERMINED COEFFICIENTS Example 5 • Ordinarily, we would use the trial solution • yp(x) = A cos x +B sin x • However, we observe that it is a solution of the complementary equation. • So, instead, we try: yp(x) = Ax cos x +Bx sin x
UNDETERMINED COEFFICIENTS Example 5 • Then, • yp’(x) = A cos x –Ax sin x +B sin x +Bx cos x • yp’’(x) = –2A sin x –Ax cos x + 2B cos x –Bx sin x
UNDETERMINED COEFFICIENTS Example 5 • Substitution in the differential equation gives: • yp’’ + yp = –2A sin x + 2B cos x = sin x • So, A = –½ , B = 0, and yp(x) = –½x cos x • The general solution is: y(x) = c1 cos x +c2 sin x – ½ x cos x
UNDETERMINED COEFFICIENTS • The graphs of four solutions of the differential equation in Example 5 are shown here.
UNDETERMINED COEFFICIENTS • We summarize the method of undetermined coefficients as follows.
SUMMARY—PART 1 • If G(x) = ekxP(x), where P is a polynomial of degree n, then try: • yp(x) = ekxQ(x) • where Q(x) is an nth-degree polynomial (whose coefficients are determined by substituting in the differential equation).
SUMMARY—PART 2 • If G(x) = ekxP(x)cos mx or G(x) = ekxP(x) sin mx • where P is an nth-degree polynomial, then try: • yp(x) = ekxQ(x) cos mx +ekxR(x) sin mx • where Q and R are nth-degree polynomials.
SUMMARY—MODIFICATION • If any term of yp is a solution of the complementary equation, multiply ypby x (or by x2 if necessary).
UNDETERMINED COEFFICIENTS Example 6 • Determine the form of the trial solution for the differential equation • y’’ – 4y’ + 13y =e2xcos 3x