Download
1 / 24
240 likes | 373 Views
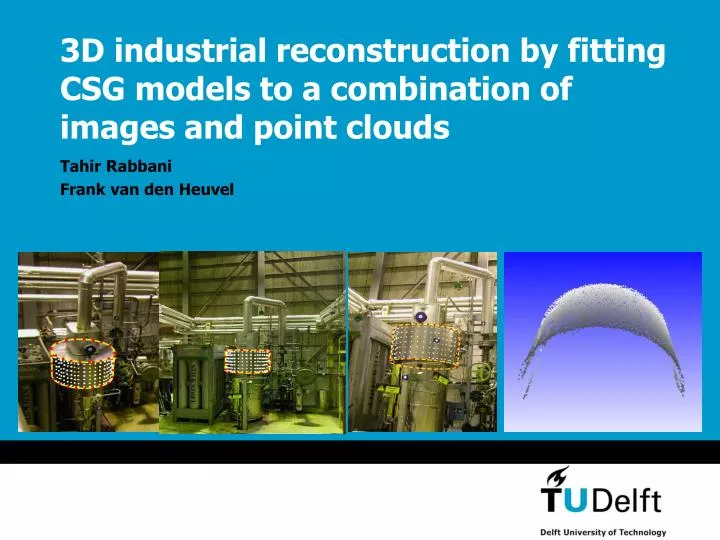
3D industrial r econstruction by fitting CSG models to a combination of images and point clouds. Tahir Rabbani Frank van den Heuvel. Overview. Introduction The approach to modelling Model fitting: point clouds and images Fitting experiments: cylinder and box Conclusions. Introduction.

E N D
3D industrialreconstruction by fitting CSG models to a combination of images and point clouds Tahir Rabbani Frank van den Heuvel
Overview • Introduction • The approach to modelling • Model fitting: point clouds and images • Fitting experiments: cylinder and box • Conclusions
Introduction • New approach for semi-automatic reverse engineering of industrial sites from images presented to ISPRS congress Amsterdam 2000
Introduction • New approach for semi-automatic reverse engineering of industrial sites from images presented to ISPRS congress Amsterdam 2000 • 2001: Automated 3D reconstruction of industrial installations from laser and image data • EU-project: Services and Training through Augmented Reality (STAR) • Partners: Siemens, KULeuven, EPFL, UNIGE, Realviz
Modelling Pipeline Overview 1. Segmentation Range data Images 2. Object Recognition CAD model Database User Input 3. Constraint detection 4. Integrated adjustment
Modelling Pipeline(1/4) • Segmentation • Grouping points of surface patches
Modelling Pipeline(2/4) • Segmentation • Grouping points of surface patches • Object Recognition • Finding planes and cylinders
Modelling Pipeline(3/4) • Segmentation • Grouping points of surface patches • Object Recognition • Finding planes and cylinders • Constraint detection • Completing the CSG model
Constructive Solid Geometry (CSG) • CSG-tree: • primitives (box, cylinder, …) • shape, pose parameters • Constraints on parameters
Modelling Pipeline(4/4) • Segmentation • Grouping points of surface patches • Object Recognition • Finding planes and cylinders • Constraint detection • Completing the CSG model • Integrated adjustment • Fitting of CSG model to range data and imagery
Integrated adjustment • Least-squares adjustment integrating: • Fitting of CSG model to point cloud • Fitting of projected model to images • Geometric constraints on (relative) pose and shape
Fitting to a point cloud • Minimise sum of squared distances in object space = shortest distance of a given point from = model surface defined by = 3D laser points
Fitting to images • Minimise sum of squared distances in image space = shortest distance of a given point from = back projected CSG model with parameters = 2D image points
Fitting – Solution • Levenberg-Marquardt method: • Improved convergence compared to least-squares • Identical to least-squares for λ=0 • Least-squares adjustment: • Assessment of precision through error propagation • Analysis of quality of fit (residuals)
Experiments • Cylinder fitting: • 6179 laser points Cyrax2500 (σ=5mm) • 3 images, 383 points Calibrated Coolpix5000 (σ=1pixel) • Box fitting: • 25162 laser points • 3 images, 416 points
Experiment: cylinder fitting results • Standard deviations Parameter Laser Integrated Length (mm) 1.86 Radius (mm) 0.63 0.57 X (mm) 0.84 0.76 Y (mm) 1.34 0.86 Z (mm) 119.90 1.65 t0 2.3e-3 2.0e-3 t1 4.0e-3 2.9e-3 t2 3.6e-1 2.4e-1
Standard deviations: Experiment: cylinder fitting results • Conclusions: • Only laser: length and position in Z undetermined • Integrated: better than 2mm, similar results for using only 1 or 2 images Parameter Laser Integrated Length (mm) 1.86 Radius (mm) 0.63 0.57 X (mm) 0.84 0.76 Y (mm) 1.34 0.86 Z (mm) 119.90 1.65 t0 2.3e-3 2.0e-3 t1 4.0e-3 2.9e-3 t2 3.6e-1 2.4e-1
Residuals (laser) Experiment: cylinder fitting results
Experiment: box fitting results • Standard deviations Parameter Laser Integrated X size (mm) 2.89 0.66 Y size (mm) 0.53 Z size (mm) 0.32 X (mm) 3.08 0.65 Y (mm) 0.55 0.16 Z (mm) 389.84 0.31 q0 4.0e-2 3.0e-2 q1 2.4e-4 1.0e-4 q2 5.2e-4 5.0e-5 q3 3.4e-4 2.0e-4
Experiment: box fitting results • Standard deviations • Conclusions: • Only laser: sizes in Y and Z undetermined • Size in X highly correlated with position in X • Position in Z undetermined • Integrated: better than 1mm, similar results for using only 1 or 2 images Parameter Laser Integrated X size (mm) 2.89 0.66 Y size (mm) 0.53 Z size (mm) 0.32 X (mm) 3.08 0.65 Y (mm) 0.55 0.16 Z (mm) 389.84 0.31 q0 4.0e-2 3.0e-2 q1 2.4e-4 1.0e-4 q2 5.2e-4 5.0e-5 q3 3.4e-4 2.0e-4
Experiment: box fitting results • Residuals (laser)
Why fusion of laser and image data? • Instrumentation developments • Scanners with integrated high-resolution camera • Accuracy improvement • Complementary: Laser for surfaces, image for edges • Flexibility of image acquisition: Completeness • Non-geometric information (What is there?)
Future / Conclusions • Future research: • Estimation of exterior orientation parameters • Integration of geometric constraints • Conclusions: • Integrated adjustment of laser and image data developed and analysed
Future / Conclusions • Future research: • Estimation of exterior orientation parameters • Integration of geometric constraints • Conclusions: • Integrated adjustment of laser and image data developed and analysed • Laser and image data are complementary: Keep the best of both worlds !