Download
1 / 17
180 likes | 527 Views
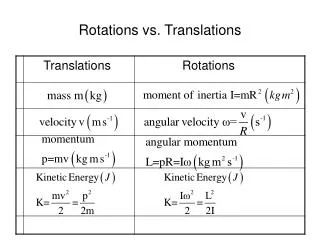
Matrices, Rotations, Translations, Transformations. 600.161 Exploring Vision in the Real World. Matrix representation. A linear system can be represented in a matrix multiplication format: 2a + 3b = 6 7a + 4b = 8. a b. =. 6 8. 3 7 4. Translations.

E N D
Matrices, Rotations, Translations, Transformations 600.161 Exploring Vision in the Real World
Matrix representation A linear system can be represented in a matrix multiplication format: 2a + 3b = 6 7a + 4b = 8 a b = 6 8 3 7 4
Translations • Translations slide an object a fixed distance in a given direction
2D Translations • 2D translations can be represented by a vector with 2 numbers [x, y] = [6, 0]
Rotations • Rotations turn an object about a fixed point (center of rotation) a fixed angle. Y X
2D Rotations • 2D rotations can be represented by one number (in degrees or radians) [90]
3D Translations • 3D translations can be represented by a vector with 3 numbers [x, y, z] = [6, 0, 3]’
3D Rotations • 3D rotations can be represented by a vector with 3 numbers. The angle to rotate about each axis. about [x, y, z] = [90, 45, 180]
cos(pi/2) = 0 sin(pi/2) =1
3D Rotations • Order of axes in which you rotate is important! • Changing the order of rotations changes the final location of the object!
Transformation • A transformation is a combination of a rotation and a translation • Whether you rotate or translate first is also important!
Uses • Transformations used extensively in computer vision and robotics.