Download
1 / 7
70 likes | 155 Views
Group 4 Autonomous Wi-Fi Sniffer RC Truck ‘GIZMO’. Sponsor CALIT2 Mentors Javier Rodriguez Molina Don Kimball Group Members Dan Curcio Anson Hsu. Agenda. Gantt Chart Tasks Technical Content Goals for Next Week Questions and Feedback. Gantt Chart. Accomplishments this Week.

E N D
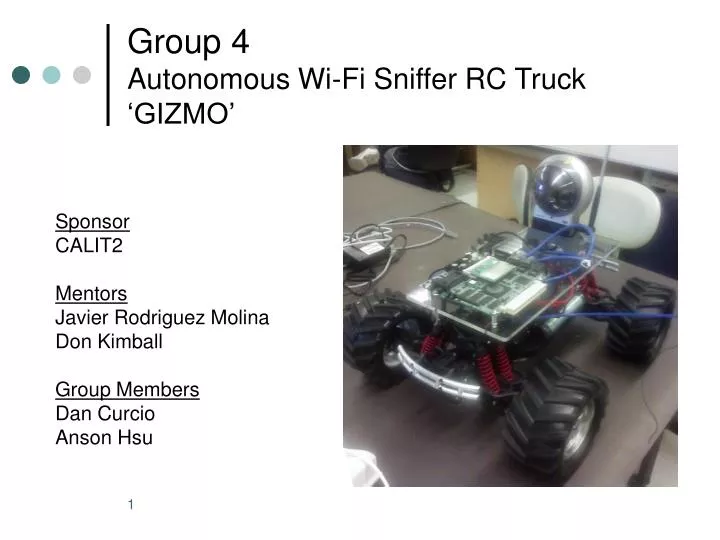
Group 4 Autonomous Wi-Fi Sniffer RC Truck ‘GIZMO’ Sponsor CALIT2 Mentors Javier Rodriguez Molina Don Kimball Group Members Dan Curcio Anson Hsu
Agenda • Gantt Chart • Tasks • Technical Content • Goals for Next Week • Questions and Feedback
Accomplishments this Week • Tested GPS functionality and NMEA protocols (Anson) • Installed 2.4GHz camera on Linux/Windows platforms (Anson) • Research software currently available that offers partial or similar functionality to the GIZMO project (Dan) • Acquired crucial hardware (Both) • CF Card
GIZMO Technical Details GIZMO is an RC truck built with off-shelf components: Components include: motor, servos, speed controller, 3-channel transmitter and receiver, Basic stamp, distant sensor, GPS, micro serial servo controller, 12v 10Ah battery supply, 5 Amp RC switch, Ethernet webcam and a Meshnode (calmesh project) board configure to be a client. Our focus will be centered on software designed to integrate GPS, webcam, and meshnet wireless network client board.
Goals for Next Week • Test GPS interface • Troubleshoot camera operation over network • Begin code development • Begin to upgrade the web interface. This includes remote monitoring and video streaming. • Any questions?