Download
1 / 1
10 likes | 157 Views
Control for Large Scale Adaptive Optical Systems. Hong Song, Karel Hinnen, Rogier Ellenbroek, Rufus Fraanje, Gleb Vdovin and Michel Verhaegen Delft University of Technology Delft Center for Systems and Control Mekelweg 2 , 2628 CD Delft The Netherlands

E N D
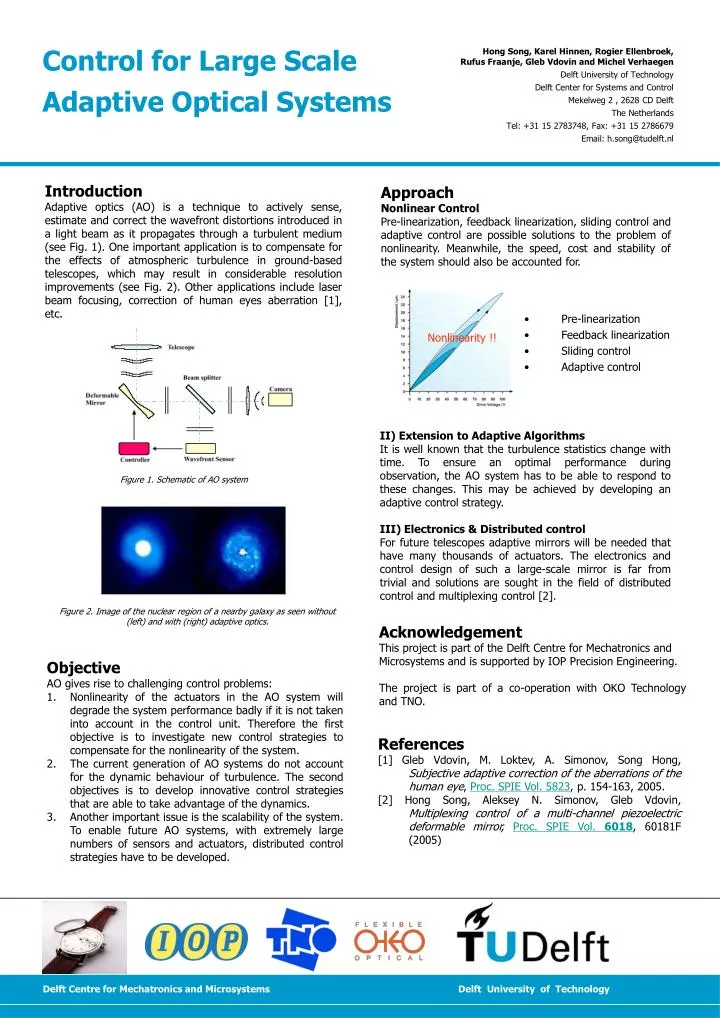
Control for Large ScaleAdaptive Optical Systems Hong Song, Karel Hinnen, Rogier Ellenbroek,Rufus Fraanje, Gleb Vdovin and Michel Verhaegen Delft University of Technology Delft Center for Systems and Control Mekelweg 2 , 2628 CD Delft The Netherlands Tel: +31 15 2783748, Fax: +31 15 2786679 Email: h.song@tudelft.nl Introduction Adaptive optics (AO) is a technique to actively sense, estimate and correct the wavefront distortions introduced in a light beam as it propagates through a turbulent medium (see Fig. 1). One important application is to compensate for the effects of atmospheric turbulence in ground-based telescopes, which may result in considerable resolution improvements (see Fig. 2). Other applications include laser beam focusing, correction of human eyes aberration [1], etc. Approach Nonlinear Control Pre-linearization, feedback linearization, sliding control and adaptive control are possible solutions to the problem of nonlinearity. Meanwhile, the speed, cost and stability of the system should also be accounted for. • Pre-linearization • Feedback linearization • Sliding control • Adaptive control Nonlinearity !! II) Extension to Adaptive Algorithms It is well known that the turbulence statistics change with time. To ensure an optimal performance during observation, the AO system has to be able to respond to these changes. This may be achieved by developing an adaptive control strategy. III) Electronics & Distributed control For future telescopes adaptive mirrors will be needed that have many thousands of actuators. The electronics and control design of such a large-scale mirror is far from trivial and solutions are sought in the field of distributed control and multiplexing control [2]. Figure 1. Schematic of AO system Acknowledgement This project is part of the Delft Centre for Mechatronics and Microsystems and is supported by IOP Precision Engineering. The project is part of a co-operation with OKO Technology and TNO. Figure 2. Image of the nuclear region of a nearby galaxy as seen without (left) and with (right) adaptive optics. • Objective • AO gives rise to challenging control problems: • Nonlinearity of the actuators in the AO system will degrade the system performance badly if it is not taken into account in the control unit. Therefore the first objective is to investigate new control strategies to compensate for the nonlinearity of the system. • The current generation of AO systems do not account for the dynamic behaviour of turbulence. The second objectives is to develop innovative control strategies that are able to take advantage of the dynamics. • Another important issue is the scalability of the system. To enable future AO systems, with extremely large numbers of sensors and actuators, distributed control strategies have to be developed. References [1] Gleb Vdovin, M. Loktev, A. Simonov, Song Hong, Subjective adaptive correction of the aberrations of the human eye, Proc. SPIE Vol. 5823, p. 154-163, 2005. [2] Hong Song, Aleksey N. Simonov, Gleb Vdovin, Multiplexing control of a multi-channel piezoelectric deformable mirror, Proc. SPIE Vol. 6018, 60181F (2005)






