Download
1 / 21
330 likes | 1.28k Views
IDENTIFICATION DES SYSTEMES EN BOUCLE FERMEE. Stéphane COLONGES Oral probatoire Février 2002. Identification des systèmes en BF Sommaire. Introduction à l ’identification Les techniques générales Identification en boucle fermée Simulation Applications Conclusion.

E N D
IDENTIFICATION DES SYSTEMES EN BOUCLE FERMEE Stéphane COLONGES Oral probatoire Février 2002
Identification des systèmes en BFSommaire • Introduction à l ’identification • Les techniques générales • Identification en boucle fermée • Simulation • Applications • Conclusion
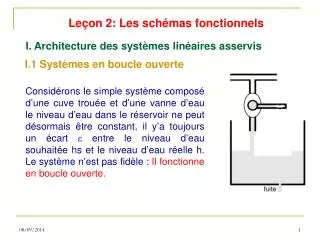
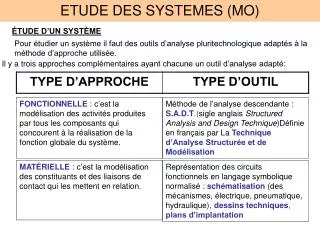
Identification des systèmes en BFIntroduction à l ’identification • Identifier un processus (système), c’est chercher un modèle (dynamique) mathématique, appartenant à une classe de modèles connue, et qui, soumis à des signaux tests (en entrée), donne une réponse (dynamique et statique en sortie), la plus proche possible du système réel [VILLAIN – 1996]. 2 catégories de modèles : • Les modèles de connaissance (basés sur les lois de la physique, de la chimie…) • Les modèles dynamiques de commande: • Modèles non paramétriques (réponse fréquentielle, réponse à un échelon) • Modèles paramétriques (fonction de transfert, équations différentielles) • Approche expérimentale pour la détermination du modèle dynamique d’un système. • 4 étapes : Acquisition des entrées sorties sous un protocole d’expérimentation . Estimation (choix) de la structure du modèle (complexité) Estimation des paramètres du modèle Validation du modèle identifié Non Oui Calcul Régulateur
Δy 100% 63% t τ = retard Identification des systèmes en BFTechniques générales • Modèles non paramétriques : • Analyse fréquentielle : longue • réponse impulsionnelle, identification par corrélation : sensible aux perturbations • Modèles paramétriques : • Méthodes graphiques (déterministes) : • à partir de la réponse à l’échelon ou en fréquence • utilisent des modèles (Strejc, Broida, Ziegler Nichols, 2 eme ordre…) τT T1 Mais...
Identification des systèmes en BFTechniques générales • Caractéristiques de ces méthodes : Peu de modèles, nécessitent signaux grande amplitude, sensibles aux perturbations, imprécises, procédures longues, impossible de valider les modèles • Néanmoins : en amenant le système à la juste instabilité, s ’applique à la B.F. • Modèles paramétriques statistiques : • Idée clés : mise en place d ’A.A.P. S.B.P.A u(t) y(t) CNA + BOZ Procédé CAN Modèle échantillonné ajustable Paramètres du modèle A.A.P. Estimation paramétrique : basée sur l ’erreur de prédiction
Identification des systèmes en BFTechniques générales • Caractéristiques des méthodes paramétriques statistiques : • éliminent les défauts mentionnés précédemment • algorithmes non récursifs (Traitement en bloc horizon de temps) • récursifs (Traitement pas à pas des données), permet suivi des paramètres en temps réel • opérant avec des signaux d’excitation extrêmement faibles (SBPA de faible niveau) • permet de modéliser les perturbations et bruits capteurs (et supprimer) • traitement aisé du signal (analyse spectrale) • Comment commence t ’on? • On choisit une structure procédé+perturbation pour l ’identification • une structure non adaptée entraîne un biais • Et ensuite?
Identification des systèmes en BFPourquoi en boucle fermée? • Système instable en B.O. ou comportement intégrateur • impératifs de production, sécurité, ou raisons économiques • dérive importante du point de fonctionnement en B.O. • motivée par de contraintes pratiques : maintenance d ’ un contrôleur • obtention de meilleurs modèles pour la commande des systèmes • validation de la commande d ’un système • synthèse d ’un régulateur robuste • biais plus faible, meilleur contrôle de la puissance d ’entrée • réduction de l ’ordre du modèle • identification en temps réel, adaptation de la commande (approche itérative) • Le problème, c ’est le retour et la corrélation du bruit non mesurable avec l ’entrée • Alors, quelles méthodes?
w r + u y T 1/S - Procédé + R - + 1/S - R Modèle A.A.P. Prédicteur ajustable Identification des systèmes en BFLes méthodes • Algorithmes récursifs : Nouvelle valeur = (n-1)+correction • CLOE : erreur de sortie en boucle fermée • y(t+1)=-a1y(t)+ b1u(t)= avec et • l ’erreur de prédiction de la B.F. : • à priori • à posteriori • la forme de l ’AAP récursif, avec mémoire est : • Et l ’A.A.P. est alors : • avec F=aI est le gain d ’adaptation matriciel
Identification des systèmes en BFSimulation • Simulation d ’un A.A.P. : • on réalise dans Simulink la simulation d ’un procédé continu, on déduit de l ’AAP : • d ’où 1 5 a s+1 Sum1 Gain1 To Workspace Transfer Fcn e Input signal K=10 F=20 1 Sum To Workspace3 s+1 Sum2 Dot Product Dot Product1 Transfer Fcn1 b 1 100 F s To Workspace1 Integrator Gain2 To Workspace2 K=5 F=100
Identification des systèmes en BFApplications • Le système de suspension active : Accélération primaire (perturbation) Accélération primaire (perturbation) Machine (masse) Cône élastomère q-d1C/D Accélération résiduelle Contrôleur Processus u(t) y(t) R/S q-dB/A - Accélération résiduelle Pré-actionneur Contrôleur Piston Figure 1:schéma du système Figure 2 : schéma fonctionnel
Consigne + Mesure Sortie Contrôleur Procédé - + - Modèle Estimation récursive des moindres carrés Identification des systèmes en BFApplications • La commande adaptative (régulation en commande auto-adaptative) : Perturbations
Console d’information / contrôleur Conducteur Voiture Filtrage - calculs Mesures Figure : schéma de circulation des informations Perturbations : postures, efforts, environnement, stress, nourriture… Entrée (médicament) + + Sortie (fréquence cardiaque, pression artérielle, capacité pulmonaire) Boite noire (modèle à identifier) + - Identification des systèmes en BFApplications • Identification du mécanisme cardiovasculaire : • Prédiction de l ’adhérance pneu/route :
Identification des systèmes en BFConclusion • L ’identification en B.F. s ’impose pour : système instable en B.O., impossibilité d ’ouvrir la boucle (production, sécurité), dérive importante du point de fonctionnement • Au delà, présente de nombreux avantages, dont : • Possibilité d ’obtenir un meilleur modèle du procédé pour la commande (Robustesse,biais plus faible, validation de la commande…) • facile d ’utilisation (avantage pratique) : re-réglage du contrôleur • réduction de l ’ordre du modèle de commande • temps réel • Perpectives : • extension des algorithmes aux cas multivariables • systèmes non linéaires • Conclusion personnelle
Identification des systèmes en BFTechniques générales • Identification avec méthode paramétrique graphique en B.F. : • On amène le système à la juste instabilité (déphasage de , gain de boucle=-1) • d ’où, avec Broida à la juste instabilité: • ainsi, on tire du gain : • et de l ’argument il vient : e r et + Ur Um C(s) G(s) - H Um t Tosc
sens de l’adaptation gradient b1 courbe (surface) isocritère a1 Identification des systèmes en BFTechniques générales • Le gradient et les MCR : • Le terme de correction doit permettre de minimiser à chaque pas le critère : • On veut une bonne vitesse de convergence au début(grand gain d ’adaptation), puis un petit gain au voisinage de l ’optimum pour pas d ’oscillations (cf simulation) • on cherche alors un AAP qui minise le critère des moindres carrés : • L ’A.A.P. devient : • avec AAP prend la forme :
Approche directe v(t) On en déduit les équations de ce système : y(t)=G0(q)u(t)+v(t) y(t)=G0(q)u(t)+H0(q)e(t) avec e(t) bruit blanc de variance alors y(t) = G0(q)S0(q)r(t)+S0(q)v(t) et u(t) = S0(q)r(t)-Fy(q)S0(q)v(t) y(t) entrée externe r(t) u(t) G0(q) + - -Fy(q) Approche indirecte Identification des systèmes en BFLes méthodes • Les approches de l ’identification en B.F. (Soderström et Stoica) : • Approche directe : pas besoin de s ’occuper du régulateur, ni du retour, pas d ’algorithme spécifique, systèmes instables supportés tant que B.F. et prédicteur stables. Mais il faut un bon modèle du bruit (sinon => biais)… méthode à choisir en premier • Approche indirecte : à partir référence et sortie => on retrouve système en B.O. en appliquant méthodes B.O.. Il faut connaître le régulateur; mais toute erreur dans la boucle est répercutée sur le modèle… ne nécessite pas une parfaite connaissance du bruit • Approche E/S commune : on considère y et u comme sorties d ’un système multivariables avec r(t) et bruit les entrées; on identifie le processus en B.O; pas besoin de connaître le régulateur. Mais il faut que le retour soit linéaire.
Carte E/S Calculateur (PC, Mac, Linux…) SBPA (possibilité 2) + SBPA (possibilité 1) y0 y1 Consigne + Régulateur Système physique y(t) u(t) Sortie Identification des systèmes en BFLes méthodes • Aspects pratiques de l ’identification :
Identification des systèmes en BFLes méthodes • Validation des modèles identifiés en boucle fermée: L’objectif de la validation est de trouver quel est le modèle du procédé qui, avec le régulateur utilisé, permet d’obtenir la meilleure prédiction du système en boucle fermée. Trois procédures de validation peuvent être définies : • .Tests statistiques de validation sur l’erreur de sortie de la boucle fermée (test d’intercorrélation entre ) • .Proximité des pôles calculés de la boucle fermée et des pôles identifiés du système réel en boucle fermée. • Validation temporelle (comparaison des réponses temporelles du système réel et du prédicteur de la boucle fermée) • Distribution du biais :
Identification des systèmes en BFSimulation • Système instable en B.O. : • Identification en B.O Identification en B.F. • Comparaison des réponses indicielles pour différentes méthodes : • En vert foncée on à la réponse réelle, en rouge, méthode ARX, méthode OE en vert clair, méthode de l’erreur de prédiction en violet (gauche : rép. à signal carré, droite : rep. échelon)
1.5 1 0.5 0 -0.5 -1 -1.5 160 0 20 40 60 80 100 120 140 Identification des systèmes en BFSimulation • Réponses et erreurs de l ’AAP dans Simulink : • K=5, F=100 : • K=10, F=20 :