Download
1 / 1
40 likes | 202 Views
Chemical Sensing Robots Using Porous Silicon. N 2. N 2. N 2. Jason R. Dorvee and Dr. Michael J. Sailor University of California, San Diego. Selective Sensing. Toluene at 2,750ppm. Toluene at 2,750ppm. Porous Silicon Synthesis. Toluene at 2,750ppm. Nerve Agent Sensor. TNT Sensor.

E N D
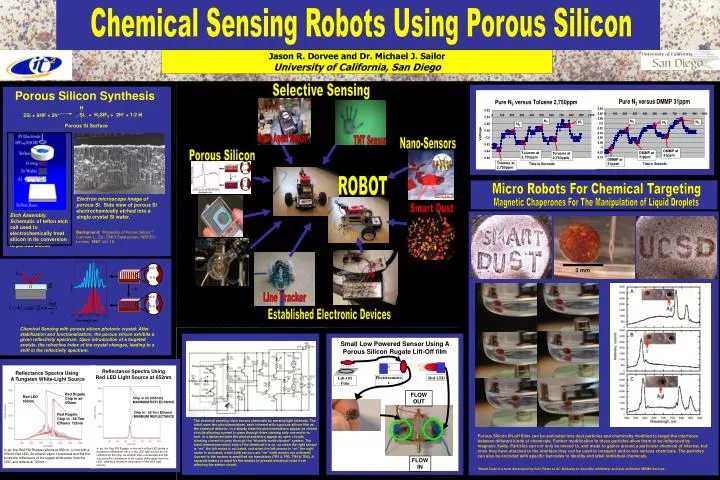
Chemical Sensing Robots Using Porous Silicon N2 N2 N2 Jason R. Dorvee and Dr. Michael J. Sailor University of California, San Diego Selective Sensing Toluene at 2,750ppm Toluene at 2,750ppm Porous Silicon Synthesis Toluene at 2,750ppm Nerve Agent Sensor TNT Sensor Nano-Sensors Porous Silicon ROBOT Micro Robots For Chemical Targeting Magnetic Chaperones For The Manipulation of Liquid Droplets Smart Dust nd 2 I = 4 I cos ( 2 p · ) 0 l Etch Assembly. Schematic of teflon etch cell used to electrochemically treat silicon in its conversion to porous silicon Background:“Properties of Porous Silicon;” Canham, L., Ed.; EMIS Datareviews, INSPEC: London, 1997; Vol. 18. 3 mm Si-R l R-Si }d n Line Tracker Intensity + A Chip in air (655nm) MAXIMUM REFLECTANCE Si-R H Established Electronic Devices Chip in ~59 Torr Ethanol MINIMUM REFLECTANCE R-Si + H2 SiF6 + 2H+ Si 2Si + 6HF + 2h+ 500 600 700 800 900 Porous Si Surface Wavelength (nm) + 1/2 H 2 Chemical Sensing with porous silicon photonic crystal: After stabilization and functionalization, the porous silicon exhibits a given reflectivity spectrum. Upon introduction of a targeted analyte, the refractive index of the crystal changes, leading to a shift in the reflectivity spectrum. Small Low Powered Sensor Using A Porous Silicon Rugate Lift-Off film Reflectance Spectra Using A Tungsten White-Light Source Red LED Phototransistor Lift-Off Film Reflectance Spectra Using Red LED Light Source at 652nm FLOW OUT Red Rugate Chip in air 655nm Red LED 652nm Red Rugate Chip in ~59 Torr Ethanol 725nm The chemical sensing robot senses chemicals by sensing light intensity. The robot uses two phototransistors, each covered with a porous silicon film as the chemical detector. In a steady state the phototransistors appear as closed circuits allowing current to pass through them causing only one motor to turn. In a darkened state the phototransistors appear as open circuits allowing current to pass through the “bistable multi-vibrator” system. The robot memorizes which side of the chemical it is on, so when the right sensor is “on” the left motor is activated, and when the left sensor is “on” the right motor is activated, when both sensors are “on” both motors are activated. Current to the motors is amplified via transistors (TR3 & TR5, TR4 & TR6). A separate battery is used for the motors to prevent electrical noise from affecting the sensor circuit. Porous Silicon lift-off films can be sonicated into dust particles and chemically modified to target the interfaces between different kinds of chemicals. Further modification to these particles allow them to be influenced by magnetic fields. Particles can not only be moved to, and made to gather around a particular chemical of interest, but once they have attached to the interface they can be used to transport and/or mix various chemicals. The particles can also be encoded with specific barcodes to identify and label individual chemicals. Electron microscope image of porous Si. Side view of porous Si electrochemically etched into a single crystal Si wafer. In air, the Red PSi Rugate reflects at 655nm, in-line with a 652nm Red LED. As ethanol vapor condenses and fills the pores the reflectance of the rugate shifts away from the LED, and reflects at 725nm. N2 In air, the Red PSi Rugate, in-line with a Red LED yields a maximum reflectance value of the LED light source as it is reflected off the chip. As ethanol vapor condenses and fills the pores the reflectance of the rugate shifts away from the LED, yielding a minimum reflectance of the LED light source. N2 N2 FLOW IN *Smart Dust is a term developed by Kris Pister at UC Berkeley to describe millimeter and sub-milimeter MEMS devices. DMMP at 31ppm DMMP at 31ppm DMMP at 31ppm