Download
1 / 22
220 likes | 389 Views
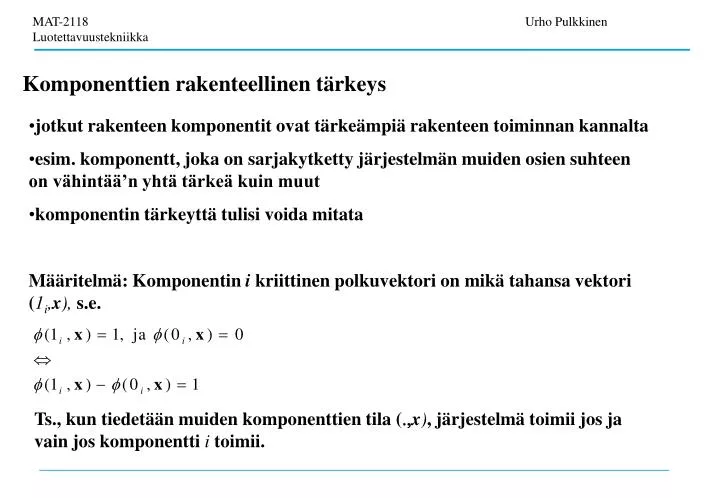
Komponenttien rakenteellinen tärkeys. jotkut rakenteen komponentit ovat tärkeämpiä rakenteen toiminnan kannalta esim. komponentt, joka on sarjakytketty järjestelmän muiden osien suhteen on vähintää’n yhtä tärkeä kuin muut komponentin tärkeyttä tulisi voida mitata

E N D
Komponenttien rakenteellinen tärkeys • jotkut rakenteen komponentit ovat tärkeämpiä rakenteen toiminnan kannalta • esim. komponentt, joka on sarjakytketty järjestelmän muiden osien suhteen on vähintää’n yhtä tärkeä kuin muut • komponentin tärkeyttä tulisi voida mitata • Määritelmä: Komponentin i kriittinen polkuvektori on mikä tahansa vektori (1i,x), s.e. Ts., kun tiedetään muiden komponenttien tila (x), järjestelmä toimii jos ja vain jos komponentti i toimii.
Komponenttien rakenteellinen tärkeys Määritelmä: Kriittistä polkuvektoria (1i,x) vastaava komponentin i kriittinen polkujoukko C(1i,x) on • kriittisten polkujoukkojen lukumäärä on • kaikkien tilavektorien (.i,x) lukumäärä on 2n-1
Komponenttien rakenteellinen tärkeys Määritelmä: Komponentin i rakenteellinen tärkeys (Birnbaum): • Esimerkki: 2/3 rakenne
Komponenttien rakenteellinen tärkeys • Esimerkki: 2/3 rakenne • Esimerkki: 2/3 rakenne. Kaikkien komponenttien rakenteellinen tärkeys on sama.
Rakennefunktion ositussääntö (pivotal decomposition) • kaikki rakennefunktiot voidaan kirjoittaa muotoon: • osituksen voi tehdä toistetusti • ositus on hyvä keino muodostaa rakenne funktioita
Koherenttien rakenteiden muodostamat modulit/ rakennefunktion muodostaminen koherenteista moduleista • Olkoon koherentti rakenne. Jos sen komponentit voidaan kuvata koherentteina rakenteina, puhutaan koherenttien modulien kuodostamasta rakenteesta • rakenteen näkeminen moduleina helpottaa rakennefunktion kirjoittamista
Riippumattomien komponenttien muodostamat järjestelmät • komponenttien tilat Xi(t) ovat satunnaismuuttujia • järjestelmän tilavektori X(t) = (X1(t), X2(t),…, Xn(t)) ja järjestelmän tila(X(t)) ovat satunnaismuuttujia • luotettavuusanalyysissa ollaan kiinnostuneita seuraavista todennäköisyyksistä • jos komponettien tilat ovat riippumattomia satunnaismuuttujia, ko. todennäköisyyksien laskenta yksinkertaistuu • tarkastellaan aluksi korjaamattomia komponentteja ja järjestelmiä
Riippumattomien komponenttien muodostamat järjestelmät • jos komponentteja korjataan edellä esitetyt todennäköisyydet vastaavat komponenttien ja järjestelmän käytettävyyttä (tai epäkäytettävyyttä) • korjaamattomilla komponenteilla ja järjestelmillä toimintatodennäköisyys (= survival probability, reliability) eli tn. että komponentti tai järjestelmä toimii vielä hetkellä t on sama kuin komponentin kaytettävyys • korjattavien komponenttien käytettävyystarkasteluihin palataan myöhemmin
Järjestelmien toimintatodennäköisyys • komponenteille pätee: • järjestelmien tapauksessa luonnollisesti: • jos komponentit riippumattomia, ps(t) riippuu vain todennäköisyyksistä pi(t)
Järjestelmien toimintatodennäköisyys • siis: • sarjajärjestelmä:
Järjestelmien toimintatodennäköisyys • rinnakkaisjärjestelmä:
Järjestelmien toimintatodennäköisyys • k/n-järjestelmä:
Järjestelmien toimintatodennäköisyys • huom! pi(t)=Ri(t), pS(t)=RS(t) • sarjajärjestelmälle • Jos komponenttien vikaantumisajat eksponentiaalijakautuneita, niin
Järjestelmien toimintatodennäköisyys • MTTF:n lausekkeet tulevat epähavainnollisiksi yleisille järjestelmärakenteille • mikäli kaikki “komponentit eksponentiaalisia” ja niiden vikataajuudet ovat samat, yleiselle k/n rakenteelle saadaan tulos:
Järjestelmien toimintatodennäköisyys • VAIHTOVARMENNUS • vaihtovarmennuksessa komponentti varmennetaan toisilla komponentilla, jotka otetaan käyttöön sitä mukaa kun komponentit vikaantuvat • aluksi “pääkomponentti” toimii, sen vikaantuessa otetaan käyttöön varalla ollut varmentava komponentti, jonka vikaantuessa jälleen uusi varmentava komponenti, jne. • järjestelmä vikaantuu, kun viimeinenkin varmentava komponentti on vikaantunut
Järjestelmien toimintatodennäköisyys • Vaihtovarmennus on • “kylmä”, kun varmentavat komponentit eivät voi vikaantua varallaoloaikana • “lämmin”, kun varmentavat komponentit ovat osittaisen käyttörasituksen alaisia, ja näin ollen voivat vikaantua varallaoloaikana, mutta pienemmällä todennäköisyydellä • “kuuma”, kun varmentavat komponentit ovat täyden käyttörasituksen alaisia, ja näin ollen voivat vikaantua varallaoloaikana, samalla todennäköisyydellä kuin normaalisti (vrt. rinnakkaisrakenne)
Järjestelmien toimintatodennäköisyys Vaihtovarmennusjärjestelmän lohkokaavioesitys 1 1 2 2 n
Järjestelmien toimintatodennäköisyys • kylmän vaihtovarmennuksen toimintatodennäköisyys: • kylmän vaihtovarmennuksen vikaantumisajan jakauma on komponenttien vikaantumisaikojen summan jakauma (voidaan laskea konvoluution avulla yleisessä tapauksessa)
Järjestelmien toimintatodennäköisyys • kylmän vaihtovarmennuksen toimintatodennäköisyys, kun komponentit identtisiä, ja niilla on eksponentiaalisesti jakautunut vikaantumisaika • todennäköisyys, että järjestelmä toimii = tn. että siinä on esiintynyt enintään n-1 vikaa • eksponentiaalisesti jakautuneet vikaantumisajat => vikojen lukumäärä Poisson-jakautunut =>
Järjestelmien toimintatodennäköisyys • kylmän vaihtovarmennus: epätäydellinen kytkentä, eli varmentavat komponentit eivät voi vikaantua varallaoloaikaina, mutta varmentavan komponentin kytkentä epäonnistuu todennäköisyydellä p • tarkastellaan kahden komponentin järjestelmää, eksponenitaaliset (mutta erilaiset vikataajuudet) vikaantumisajat • järjestelmä voi toimia tarkasteltavan aikavälin (0,t)kahdella toisensa poissulkevalla tavalla • 1. pääkomponentti toimii vikaantumatta tarkasteltavan aikavälin (tapahtuma A) • 2. pääkomponentti vikaantuu jollakin hetkellä t1, varakomponentin kytkentä onnistuu, ja komponentti toimii vikaantumatta aikavälin loppuun saakka (tapahtuma B)
Järjestelmien toimintatodennäköisyys • järjestelmän toimintatodennäköisyys on tapahtumien A ja B todennäköisyyksien summa
Järjestelmien toimintatodennäköisyys • jos komponentit ovat identtiset, niin • MTTF on luonnollisesti • jos komponentteja on enemmän kuin kaksi, lasku etenee samalla tavalla • jos q=1, tavallinen kylmä vaihtovarmennus