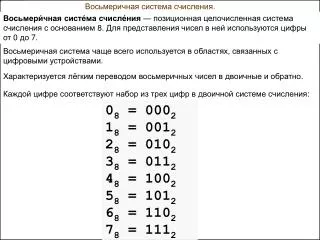
Download
1 / 21
450 likes | 1.63k Views
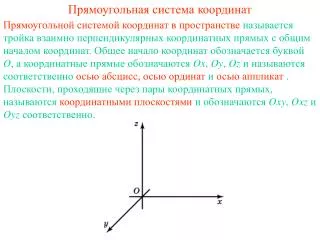
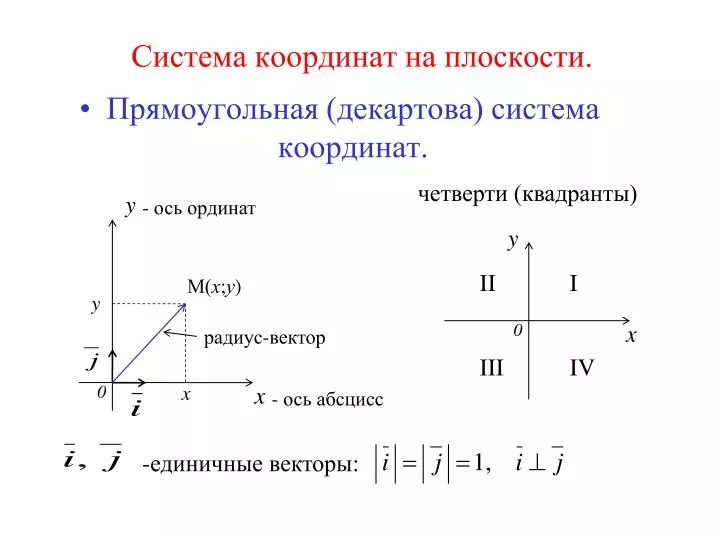
Система координат на плоскости. Прямоугольная (декартова) система координат. четверти (квадранты). y. - ось ординат. y. II. I. М( х ; у ). y. 0. x. радиус-вектор. III. IV. 0. x. x. - ось абсцисс. -единичные векторы:. Полярная система координат. 0. P. полюс. полярная ось.

E N D
Система координат на плоскости. • Прямоугольная (декартова) система координат. четверти (квадранты) y - ось ординат y II I М(х;у) y 0 x радиус-вектор III IV 0 x x - ось абсцисс -единичные векторы:
Полярная система координат. 0 P полюс полярная ось единичный вектор - полярные координаты точки М - полярный радиус - полярный угол
Связь между прямоугольными и полярными координатами. y М Пусть М (х; у) –прямоугольные координаты т. М - полярные координаты т. М x 0 Р или
Пример 1. Найти прямоугольные координаты точки М, если даны её полярные координаты: Решение: Имеем: Находим: Ответ.
Пример 2. Найти полярные координаты точки М, если даны её прямоугольные координаты: Решение: Имеем: Находим: y x 0 Р М Ответ.
Преобразование системы координат • Переход от одной системы координат в какую-либо другую называется преобразованием системы координат.
1. Параллельный перенос (пп) осей координат. Под пп осей координат понимают переход от системы координат OXYк новой системе O’X’Y’ , при котором меняется положение начала координат, а направление осей и масштаб остаются прежними. Y’ Y 0’ X’ 0 X
Y Y’ M y Пусть O’(x0;y0)- начало новой системы координатO’X’Y’ y’ y0 x’ X’ 0’ x 0 x0 X M(x;y) – координаты точки в системе OXY M(x’;y’) – координаты точки в системе O’X’Y’
Y Y’ M y y’ y0 x’ X’ 0’ x 0 x0 X
Нахождение старых координат (x;y), если известны новые (x’;y’) Нахождение новых координат , если известны новые.
Пример 3.Путем пп осей за новое начало координат взята точка O’(2;-5). Найти координаты точки P в новой системе, если её координаты в старой системе (-3;4) Решение: Имеем: Находим: Ответ.
2. Поворот осей координат. Под поворотом осей координат понимают такое преобразование координат, при котором обе оси поворачиваются на один и тот же угол, а начало координат и масштаб остаются неизменными. Y Y’ X’ 0 X
Y Y’ M y ПустьO(x’; y’)- начало новой системы координат OX’Y’ y’ X’ x’ 0 x X M(x;y) – координаты точки в системеOXY M(x’;y’) – координаты точки в системеOX’Y’
Y Y’ M y Возьмем две полярные системы координат с общим полюсом О и полярными осями OX и OX’ y’ X’ x’ 0 x X - полярный радиус в обеих системах одинаков – полярный угол в системеOX’Y’ – полярный угол в системеOXY
По формулам перехода от полярных координат к прямоугольным: ⇒ Так как определяет старые координаты (x;y) через новые (x’;y’) то
Выведем формулу, которая позволяет выразить новые координаты через старые: Найдем x’ и y’
Итак: определяет новые координаты (x’;y’) через старые (x;y)
Пример 4.Новые оси повернуты относительно старых на угол α=π/4 Найтивыражения старых координат произвольной точки плоскости (х;у) через её новые координаты (x’;y’) Решение: ⇒
Пример 5.Найти координаты точки Р в новой системе, повернутой относительно старой на угол α=π/6 , если её координаты в старой системе равны (-2;3). Решение: Имеем:
3. Параллельный перенос и поворот осей координат. Если новая система координат O’X’Y’ получена из старой ОХУ путём пп осей координат и последующим поворотом осей на угол α, то путем введения вспомогательной системы легко получить формулы, выражающие старые координаты (х;у) произвольной точки через её новые (x’;y’). Y’ Y M y y’ X’ x’ y0 0’ x 0 x0 X
Y’ Y Параллельный перенос. - новые координаты M y y’ X’ x’ y0 Относительно поворачиваем на угол α и получаем новую систему координат O’X’Y’ 0’ x 0 x0 X Итак: