Download
1 / 17
170 likes | 334 Views
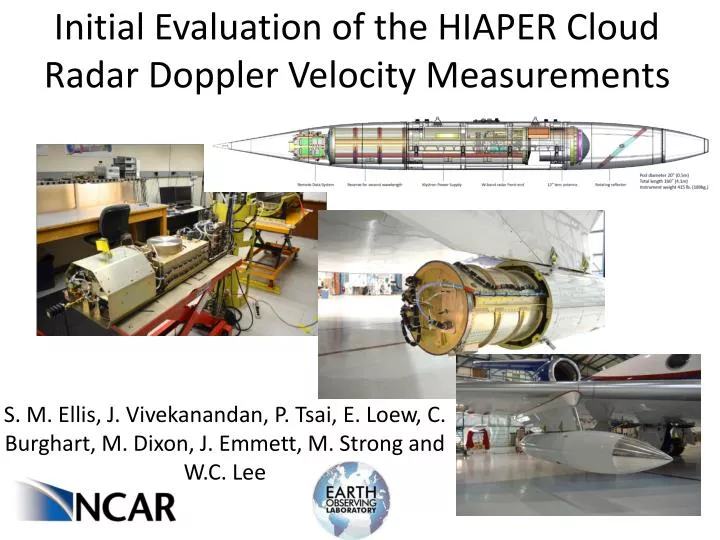
Initial Evaluation of the HIAPER Cloud Radar Doppler Velocity Measurements. S. M. Ellis, J. Vivekanandan , P. Tsai, E. Loew , C. Burghart , M. Dixon, J. Emmett, M. Strong and W.C. Lee. HIAPER Cloud Radar. NSF deployment pool instrument Requestable community resource

E N D
Initial Evaluation of the HIAPER Cloud Radar Doppler Velocity Measurements S. M. Ellis, J. Vivekanandan, P. Tsai, E. Loew, C. Burghart, M. Dixon, J. Emmett, M. Strong and W.C. Lee
HIAPER Cloud Radar • NSF deployment pool instrument • Requestable community resource • http://www.eol.ucar.edu/ • Contact Vivek, vivek@ucar.edu • Contact Scott Ellis, sellis@ucar.edu • Presentation: Requestable NSF Lower Atmospheric Observing Facilities for Scientific Research and Project-based Education - Tuesday, 17 September 2013 6-7:30pm in Colorado Ballroom V
HCR System Overview • Deployable on NCAR GV, High-performance Instrumented Airborne Platform for Environmental Research (HIAPER) • Pod-based (under wing) • Other aircraft that can support large pod • Deployable on ground • Vertical pointing • Container houses both HCR and HSRL • Coincident radar/lidar facilitates particle size estimates in liquid and ice (e.g. Donovan et al, 2001; Tinel et al. 2005; Eloranta et al. 2007; Delanoe and Hogan, 2008) • Dual-polarization • Currently LDR mode
HCR System Overview • W-band • Scanning in azimuth • Mechanical scanning nominally 30 deg/sec but up to 60 • In-flight, real-time aircraft attitude adjustment
High-performance Instrumented Airborne Platform for Environmental Research (HIAPER) • 5,600 pounds (2,540 kilograms) Payload • For example: HCR, HSRL and microphysics/chemistry probes • Max altitude 51,000 ft (less with full payload) • Range of about 7,000 miles (11,265 kilometers)
Simulations of Performance • Developed program to estimate measurement errors for different operating parameters • Navigation correction accuracy • Pitch • Roll • Drift • Pointing accuracy • Measurement variance • Dwell time • Spectrum width • Unknown winds not at flight level Wind
Calibration and Ground Tests • Engineering calibration • Comparisons with Wyoming Cloud Radar (WCR) • Real-time system monitoring • For details see poster #305 Thursday at 1:30PM by Pei-Sang Tsai HCR Power, dBm WCR Power, dBm
Navigation Correction • C-Migit INS/GPS system • Located at reflector for negligible moment arm • Size fits in the pod • Performance is quite good • 100 Hz data • Accurate to about 0.01 deg • Real-time correction of pointing angle • Keeps antenna pointing in desired direction • Helps mitigate the cross wind errors Wind
Time Series Recording • The HCR records the I and Q time series data for all flights • Enables investigation of advanced signal processing • Benefits data quality • Spectral display tool has been developed
Test Flights Completed - SAANGRIA • Test flights completed in February and March 2013 • EMI tests • Radar ran reliably • Pressure leak • Antenna fixed at near nadir • Flight patterns for pointing calibration performed based on Haimov and Rodi (2013) • Uses ground echoes – need flat terrain, with no forest, no water • Straight and level upwind/downwind • Straight and level cross wind • Left and right circles with roll angles ~ 20 to 30 deg • Calibrated pointing following Haimov and Rodi (2013) • Corrected radial velocity for aircraft motion following Lee et al. (1993) • Analyzed ground echo velocity on other data sets
Test Flights Completed - SAANGRIA Ground echoes: Mean Vr = 0.001 m/s Std dev Vr = 0.086 m/s VarVr = 0.0074 m/s (10 minutes of data over level ground)
Test Flights Completed - SAANGRIA • Verified sensitivity - ongoing • Spectra checked for spurious artifacts
Test Flights Planned- IDEAS IV • Beginning this week! (delayed by floods) • First implementation of real-time pointing correction • First test of scanning capability • Correction of issues identified during SAANGRIA • Pressure vessel leak • EMI
Future Plans • Continue testing and verification of data quality • Calibration • Dual-pol • Navigation correction and pointing • Deploy for CSET • Study stratocumulus clouds between California and Hawaii • Funded for summer of 2015 • Add second wavelength • Beam- and resolution-matched Ka-band • Funding dependent
Thank YouQuestions? Various probes HCR pod Dropsonde
CSU-CHILL Comparison GV Skin Paint CHILL Data HCR Data Altitude AGL, km 60 30 0 Radius, km (approximate distance GV traveled in 60 sec) Time, seconds