Download
1 / 21
210 likes | 434 Views
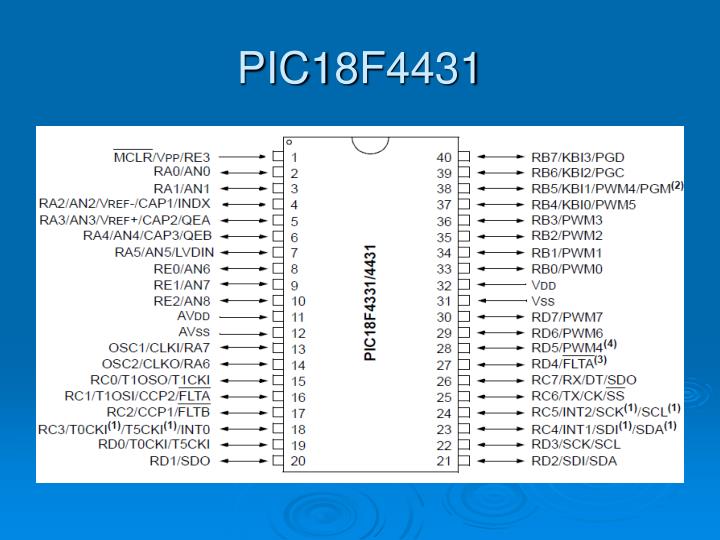
PIC18F4431. PIC18F1330. Infrared Encoder/Decoder. IrDA system block diagram. HSDL-3000. L298 Dual full-bridge driver. For higher currents, outputs can be paralleled. Pwm. 1. 0. t. a .T. (1 - a ).T. T. How to control DC motor speed ?. POWER. dir. H-bridge. from microcontroller.

E N D
Pwm 1 0 t a.T (1 - a).T T How to control DC motor speed ? POWER dir H-bridge from microcontroller DC motor Vmotor pwm • T is the period. • The duty cycle (a) is generally given in percent. • For a power supply of U volts, Vmotor = a.U.
RC Servo Motor 3 wires: power, ground, control Control signal sets the position. High pulse every ~20 ms determines set angle; pulse width between ~0.5 ms and ~2 ms, indicating the two ends of angle range Internal gearing, potentiometer, and feedback control.
