Download
1 / 10
110 likes | 121 Views
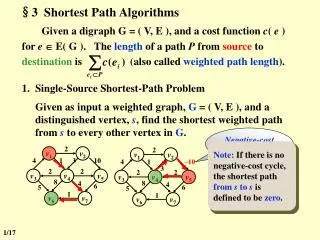
Shortest Path Algorithms. Aditya Kumar Sehgal Amlan Bhattacharya. Single Source Shortest Path – Dijkstra’s Algorithm. Weighted graph G = ( V , E , w ) Find the shortest paths from a vertex v Î V to all other vertices in V Edge may represent cost, time, etc.

E N D
Shortest Path Algorithms Aditya Kumar Sehgal Amlan Bhattacharya
Single Source Shortest Path – Dijkstra’s Algorithm • Weighted graph G = (V, E, w) • Find the shortest paths from a vertex vÎV to all other vertices in V • Edge may represent cost, time, etc. • Dijkstra’s algorithm incrementally finds the shortest path from s to all other vertices • greedy algorithm • similar to Prim’s algorithm for finding minimum spanning tree
Single Source Shortest Path – Dijkstra’s Algorithm procedure DIJKSTRA_SSSP(V, E, w, s) begin VT := {s}; for all vÎ (V – VT) do if (s, v) exists set l[v] := w(s, v); else set l[v] := ¥; whileVT¹Vdo begin find a vertex u such that l[u] := min{l[v] | v Î (V – VT)}; VT := VTÈ {u}; for all vÎ (V – VT) do l[v] := min{l[v], l[u] + w(u, v)}; endwhile end DIJKSTRA_SSSP
Parallel Formulation of Dijkstra’s Algorithm • Similar to parallel formulation of Prim’s algorithm • Let p be number of processors and n be the number of vertices • Divide V into p subsets using 1-D block mapping • each subset has n/p consecutive vertices • work associated with each subset is assigned to a different process • each process stores the part of the array l that corresponds to Vi, where Vi is the subset of vertices assigned to process Pi.
Parallel Formulation of Dijkstra’s Algorithm • Steps • Each process computes li[u] = min{li[v] | vÎ (V – VT) ÇVi} during each iteration of the while loop • Global minimum is obtained over all li[u] by using all-to-one reduction operation and is stored in process P0 • inserted into VT at P0 • P0 broadcasts u to all processes using a one-to-all broadcast • inserted into VT at each Pi • each process updates d[v] for its local vertices • needs to store weight adjacency matrix for columns in Vi • 1-D block mapping of the adjacency matrix at each process
Parallel Formulation of Dijkstra’s Algorithm • Tp = Q(n2/p) + Q(nlogp) • Ts = Q(n2) • Speedup = Q(n2)/Q((n2/p)+(nlogp)) • Efficiency = 1/(1 + Q((plogp)/n))
All Pairs Shortest Paths • Weighted graph G = (V, E, w) • Find the shortest paths between all pairs of vertices vi, vjÎV such that i ¹j • output is an n x n matrix D, where each element Dij is the cost of shortest path between vi and vj
All Pairs Shortest Paths – Dijkstra’s Algorithm • Previously described algorithms can be used • Source Partitioned Formulation • Uses n processes • Each process Pi finds shortest paths from vi to all other vertices using Dijkstra’s sequential SSSP • No communication required • Algorithm can use only n processes • good performance if n = Q (p) • Doesn’t work so well for p > n • Tp = Q(n2) • Speedup = Q(n3)/Q(n2) • Efficiency = Q(1)
All Pairs Shortest Paths – Dijkstra’s Algorithm • Source Parallel Formulation • Major problem with source-partitioned approach is that only n processes can be used • Performance can be improved if parallel version of Dijkstra’s SSSP is used • p processes are divided into n partitions with p/n processes each (p > n) • Each of the n SSSP problems is solved by one of the partitions
All Pairs Shortest Paths – Dijkstra’s Algorithm • Tp = (n3/p) + (nlogp) • Speedup = (n3)/((n3/p) + (nlogp)) • Efficiency = 1/(1 + ((plogp)/n2)) • Source-parallel technique exploits more parallelism that the source-partitioned technique • W = Knplog(p) (pTp – Ts = To) W = KW1/3plog(p) W = K3/2plog(p)3/2 • Better isoefficiency function that source-partitioned function