Download
1 / 22
220 likes | 289 Views
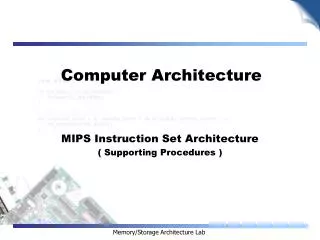
Computer Architecture. Part II-B: CPU Instruction Set. mov BL, 02h mov AX,0A56h mul BL. Levels of Representation. temp = v[k]; v[k] = v[k+1]; v[k+1] = temp;. High Level Language Program. Compiler. Assembly Language Program. Assembler. 0000 1001 1100 0110 1010 1111 0101 1000

E N D
Computer Architecture Part II-B: CPU Instruction Set
mov BL, 02h mov AX,0A56h mul BL Levels of Representation temp = v[k]; v[k] = v[k+1]; v[k+1] = temp; High Level Language Program Compiler Assembly Language Program Assembler 0000 1001 1100 0110 1010 1111 0101 1000 1010 1111 0101 1000 0000 1001 1100 0110 1100 0110 1010 1111 0101 1000 0000 1001 0101 1000 0000 1001 1100 0110 1010 1111 Machine Language Program Machine Interpretation Control Signal Specification ALUOP[0:3] <= InstReg[9:11] & MASK
Instruction Set Design software instruction set hardware Which is easier to change?
Instruction Set • The set of machine level instructions for a particular type of computer or hardware
Instruction Cycle • The sequence of operations involved in processing an instruction
Instruction Fetch Instruction Decode Operand Fetch Execute Result Store Next Instruction Instruction Cycle Obtain instruction from program storage Determine required actions and instruction size Locate and obtain operand data Compute result, value or status Deposit results in storage for later use Determine successor instruction
CPU-Memory Handshake • The CPU operates, then memory • There is a need for synchronization between CPU and memory • Can be done through handshaking • Memory can inform the CPU that it has completed its read/write request through a Memory Function Complete (MFC) signal
Types of Control • Hardwired • Microprogrammed
Hardwired Control • Pure hardware mode of control • The control unit tells the rest of the CPU what is to be done every clock cycle during the execution of instructions • Involves complex circuit design
Hardwired Control Considerations • Fast • Everything is done through hardware • Permanent • Difficult and costly to do modifications • Difficult to implement in a large instruction set
Microprogrammed Control • Each instruction is broken down into a series of steps, i.e. microinstructions (or microcode) • The control unit becomes a miniature computer • The complete set of steps for each instruction is stored in a ROM called the control store, and is executed sequentially
Microprogrammed Control • Decoding involves obtaining the starting address in the control store of the first control word (or microinstruction) for the instruction
Microprogrammed Control Considerations • Flexible • Only the control store needs modifications to implement/modify instruction execution • Slower • May require more hardware
Microprogrammed Control Units • Introduced by IBM in 1964 • Microprogrammed control units have seen widespread use for several reasons: • Easy to implement complex instructions • Cost of microprogramming is far less than the cost of implementing a conventional hardwired control unit • Easy to add instructions and/or modify existing ones
CISC and RISC • There are two schools of thought on instruction set design: • Complex instruction set computers (CISC) • Reduced instruction set computers (RISC)
Complex Instruction Set Computers (CISC) • Upward compatibility • New processor designs had to provide more power over older models while maintaining compatibility • More complex and powerful instructions! • Generally requires the use of microcode • Easily benefits from improved technology
CISC • Richer or more complex instruction sets simplify compiler design • Reduced software development and learning costs • More powerful instructions means fewer instructions are needed to implement software routines • Reduced system memory and bandwidth requirements
CISC Issues • The more complex the instruction set, the larger the required control store • Compilers tend to make use of few of the available instructions • 80/20 rule: Analysis of the instruction mix generated by CISC machines shows that 80% of the instructions executed used only 20% of the instructions set
CISC Issues • CISC designers may have introduced a lot of instructions simply because it was easy to do OR because its competitors did so • Manufacturing cost is increased because of the need to test all operations and combinations of operations • Design cost is increased for future systems because of the need to maintain upward or forward compatibility
Reduced Instruction Set Computers (RISC) • 80/20 rule: If the most often used instructions (the 20%) was speeded up then the performance benefits would be greater • Studies showed that these instructions tend to perform simpler operations and would use only the simpler addressing modes • Complex operations can still be done by using several simpler operations
Why RISC? • Basic hardware is simpler to implement • Easier to adopt hardwired control. • Easier to compile for a RISC than a CISC architecture • Design effort and development cost is less for RISC than for a CISC processor
RISC CPU Characteristics • Fewer instructions • More CPU registers • More instructions needed to execute routines • May mean more memory space and increased bandwidth requirements