Download
1 / 11
110 likes | 292 Views
Sterowanie impulsowe. Wykład 6 Regulacja impulsowa z modulacją szerokości impulsu sterującego. Konstrukcja i zasada działania regulatora PWM

E N D
Sterowanie impulsowe Wykład 6 Regulacja impulsowa z modulacją szerokości impulsu sterującego
Konstrukcja i zasada działania regulatora PWM Regulatory impulsowe, w tym regulatory z modulacją szerokości impulsów, posiadają wielezalet, dzięki którym powoli wypierają tradycyjne regulatory ciągłe. Mniejsze, lżejsze, coraz dokładniejsze i bardziej efektywne a w dobie ekspansji techniki cyfrowej, łatwiejsze w realizacji i implementacji w układach sterowania. Zapewniają znacznie lepsze właściwości regulacyjne w przypadku sterowania obiektami o dużej inercji i z dużym opóźnieniem [1]. Wadami jakie posiadają regulatory impulsowe są hałas wynikający z pracy elementów przełączających oraz trudny proces matematycznej analizy działania. Obecnie w praktyce stosuje się gotowe układy scalone, posiadające wbudowane regulatory sygnału PWM. Do najbardziej znanych i rozpowszechnionych w dziedzinie budowy zasilaczy impulsowych należą układy z rodziny UC38xx, produkowanej przez znaną na rynku elektronicznym firmę Texas Instruments oraz TOP242-250 firmy Power Integrations. Umieszczone na stronach firmowych dokumentacje, zawierają dokładne specyfikacje modeli oraz przykłady budowy kompletnych układów przetwornic impulsowych, opartych na danym mikrokontrolerze. Niezależnie od producenta czy modelu kontrolera, wszystkie układy łączy jednakowa konstrukcje samego regulatora PWM. Działanie układu regulacji z modulacją szerokości impulsu (z wyłączeniem regulatorów cyfrowych) zawsze opiera się na tej samej zasadzie: porównaniu sygnału uchybu w sygnałem piłokształtnym. Schemat konstrukcji regulatora PWM pokazany jest na rysunku.
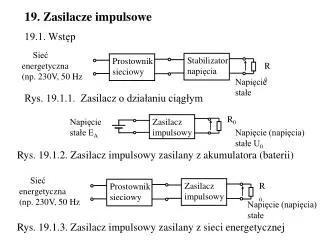
Przetwornice impulsowe W dobie ciągłego dążenia do maksymalnego wykorzystania energii, jednym z kluczowych problemów stało się zagadnienie przetwarzania energii elektrycznej. Coraz wyższe wymagania dotyczące jakości napięcia zasilania w połączeniu z dużym naciskiem na minimalizację i energooszczędność stały się motorem rozwoju techniki zasilaczy impulsowych. Te niewielkie gabarytowo urządzenia pozostają bezkonkurencyjne w stosunku do tradycyjnych zasilaczy transformatorowych, pod względem rozmiarów oraz sprawności (90% w stosunku do ok. 50% sprawności tradycyjnych przetwornic transformatorowych). Dodatkowo urządzenia te cechują bardzo dobre właściwości sygnału wyjściowego (napięcia lub prądu) jak niewielka pulsacja czy duża odporność na zakłócenia. Zasilacze impulsowe doskonale nadają się do zasilania urządzeń małej i średniej mocy. Największym wadami tych układów są skomplikowany proces projektowania oraz możliwość występowania zakłóceń elektromagnetycznych, związanych z pracą impulsową oraz występowaniem elementów indukcyjnych. Zasada działania każdego zasilacza impulsowego jest jednakowa. Podawany na wejście układu sygnał stały (np. napięcie sieci, wyprostowane przez układ Graet’za) jest następnie impulsowany przez klucz lub układ kluczy (najczęściej kluczem jest tranzystor PNP, IGBT lub MOSFET) w taki sposób, aby uzyskany na wyjściu sygnał miał wartość skuteczną równą wartości oczekiwanej. Częstotliwość pracy może mieścić się w granicach od ok. 50 do 200 kHz ([2], [6]). Dodatkowymi elementami układu zasilacza impulsowego mogą być dławiki wyjściowe, elementy pętli regulacyjnej, układy prostownikowe, zabezpieczające, etc.
Regulator PWM Regulacja szerokości impulsów odbywa się przez podanie na wejścia przerzutnika sygnału piłokształtnego oraz sygnału wyjściowego z regulatora PI. Pracujący w otwartej pętli sprzężenia zwrotnego układ, generuje na wyjściu impulsy o amplitudzie wyznaczonej wartościami nasycenia i szerokości modulowanej przez momenty przecinania się przebiegów sygnałów wejściowych. Istotną sprawą, na którą należało zwrócić uwagę dobierając parametry regulatora PI oraz regulatora sygnału PWM był fakt, użycia do budowy układu proporcjonalno – całkującego wzmacniacza operacyjnego bez nasycenia. Może to powodować, że sygnał z regulatora PI, w wyniku całkowania, wzrośnie ponad wartość amplitudy sygnału piłokształtnego. Doprowadzi to do wzrostu współczynnika wypełnienia sygnału kluczującego tranzystor do 100% czyli podawania na jego bramkę stałego napięcia. Uniemożliwi to pracę układu do momentu zresetowania poprzez rozładowanie kondensatora C3 (np. przez chwilowe odłączenie zasilania).