Download
1 / 8
80 likes | 300 Views
Simplicial Homology. Tyler White MATH 493 Dr. Wanner. Overview. Introduction to Simplicial Homology Prerequisite Definitions Definition of a Simplex Boundary Maps on Simplicies. Introduction to Simplicial Homology. Homology theory was originally developed with simplicies

E N D
Simplicial Homology Tyler White MATH 493 Dr. Wanner
Overview • Introduction to Simplicial Homology • Prerequisite Definitions • Definition of a Simplex • Boundary Maps on Simplicies
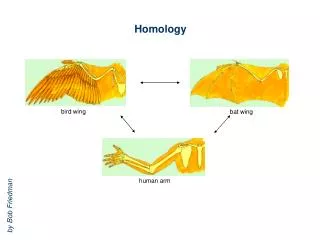
Introduction to Simplicial Homology • Homology theory was originally developed with simplicies • Every cubical set can be represented in terms of simplicies, but there are sets that can be represented in terms of simplicies but are not cubical sets. • Cubical Homology works well for a wide range of computational problems, however it is easier to work with simplicies when working in a more abstract setting.
Prerequisite Definitions • Def. A subset K of Rd is called convex if, given any two points x,y in K, the line segment [x,y] := {λx + (1 – λ)y | 0 ≤ λ ≤ 1 } joining x to y is contained in K. • Def. The convex hull conv A of a subset A of Rd is the intersection of all closed and convex sets containing A. • Theorem: Let V = {v0, v1, …, vn} є Rd be a finite set. Then conv(V) is the set of those x є Rd that can be written as n n x = Σλivi, 0 ≤ λi≤ 1, Σλi = 1 i=0 i=0
Def A finite set V = {v0, v1, …, vn } in Rd is geometrically independent if, for any x є conv(V), the coefficients λi are unique. • Proposition: Let V = {v0, v1, …, vn } є Rd. Then V is geometrically independent if and only if the set of vectors {v1 – v0, v2 – v0, …, vn – v0} is linearly independent.
Definition of a Simplex • Def: Let V = {v0, v1, …, vn} be geometrically independent. The set S = conv(V) is called a simplex or, more specifically, an n-simplex spanned by the vertices v0, v1, …, vn. The number n is called the dimension of S. If V’ is a subset of V of k ≤ n vertices, the set S’ = conv(V’) is called a k-face of S • Theorem: Any two n-simplices are homeomorphic. • Definition: A simplicial complex S is a finite collection of simplices such that 1. every face of a simplex in S is in S, 2. the intersection of any two simplices in S is a face of each of them.
Def: Given a simplicial complex S in Rd, the union of all simplices of S is called the polytope of S and is denoted by |S|. A subset P of Rd is a polyhedron if P is the polytope of some simplicial complex S. In this case S is called a triangulation of P
Boundary Maps • Restricting ourselves to Z2 we can define the boundary maps as: n δn(S) = Σ conv(V/{vi}) i=0 • Proposition: δn-1δn = 0 for all n • The simplicial boundary operator with integer coefficients is: n δk[v0, v1, …, vn] = Σ(-1)i[v0, v1, …, vi-1, vi+1, …, vn] i=0