Download
1 / 43
430 likes | 587 Views
John Reif. The Design of Autonomous DNA Nanomechanical Devices: Walking and Rolling DNA. Duke Univ. DNA Hybridization and Ligation Operations. Hybridization of sticky single-strand DNA segments.

E N D
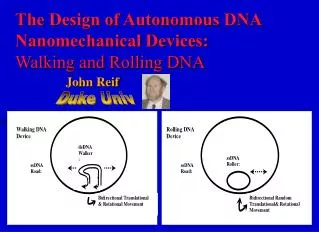
John Reif The Design of Autonomous DNA Nanomechanical Devices:Walking and Rolling DNA Duke Univ
DNA Hybridization and Ligation Operations. Hybridizationof sticky single-strand DNA segments. Ligation: If the sticky single-strand segments that anneal abut doubly stranded segments of DNA, you can use an enzymic reaction known as ligation to concatenate these segments.
Prior Nanomechanical Devices built of DNA: • Seeman • o used rotational transitions of dsDNA conformations between the B-form (right handed) to the Z-form (left-handed) controlled by ionic effector molecules and • o extended this technique to be DNA sequence dependant • Yurke and Turberfield • oused a fuel DNA strands acting as a hybridization catalyst to generate a sequence of motions in another tweezers strand of DNA • oextended this technique to be DNA sequence dependant • othe two strands of DNA bind and unbind with the overhangs to alternately open and shut the tweezers. • Other Related Work: • Shapiro’s recent autonomous 2 state DNA computing machine • uses DNA ligase and two restriction enzyme • but distinct technical methods and goals (computation)
Bernard Yurke’s Molecular Tweezers (Bell Lab):Composed of DNA and powered by DNA hybridization. -Two dsDNA arms are connected by a ssDNA hinge -Two ssDNA “handles” at the ends of the arms. To close tweezers: -Add a special “fuel” strand of ssDNA. -The “fuel” strand attaches to the handles and draws the two arms together.
B-Z DNA Nanomechanical Device [Seeman, 1999]
(b) (a) (c) (d) Nano-mechanical Rotational Transducers(Seeman, NYU)(a) DNA nanomechanical motor: Rotation via B-Z transition controlled by concentration of Co(NH3)6Cl3 .(b) Device switches between PX and JX2 topological states of DNA controlled via introduction of different strands, using Yurke’s Molecular Tweezers.(c) A test system where switching states alternates between a 'cis' configuration (PX) and a 'trans' configuration (JX2). (d) AFM pictures of four successive states through this system.
DNA Nanomechanical Device (Hao, Duke) 8 turns 180ْْ 10.5 turns Walking Triangles:By binding the short red strand (top figure) versus the long red strand (bottom figure) the orientation of and distance between the triangular tiles is altered. These changes will be observable by AFM. Applications: Programmable state control for nanomechanical devices. Also as a visual output method.
(a) (b) Nanofactory device(Seeman, NYU): PX/JX2 devices with 3 cycles of configurations.(a) Nanogen electrodes control release of hybridized strands into solution.(b) Three augmented device molecules mounted on an lattice. Set strands of device labeled: P(urple)-up and G(reen)-up. Cycle 1: -Three G-up set strands on the device, -P-up set strands released into solution. Cycle 2: -G-up strands for molecules 1 and 3 released, -P-up strand for molecule 2 released. Cycle 3: -P-up set strands for molecules 1 and 3 released, -G-up set strand for molecule 2 released.
Patterned Immobilization of Environmentally-Responsive Peptides.(on-going work in collaboration with Chilkoti, Dept. of Biomedical Eng., Duke University.)Nanoscale actuators that function in an aqueous environment.Molecular basis of nanoactuation: - ELPs are Peptides that undergo a structural transition at a characteristic temperature. - The end-to-end distance of the ELP decreases by ~50% upon collapse of the ELP in response to its phase transition. Hybrid materials composed of : (a) self-assembling DNA nanostructures and (b) elastin-like peptides (ELP) -Attachment of ELP to specific sites on DNA lattice results in arrays of peptide in a monolayer of controlled density. -May use layers of DNA sandwiched between layers of ELP.
Key restrictions on the use of prior DNA nanomechanical devices: • Minor Restriction: • They can only execute one type of motion • (rotational or translational). • Major Restriction: • Prior DNA devices require environmental changes • such as temperature cycling or • bead treatment of biotin-streptavidin beads • to make repeated motions. • Our Technical Challenge: • To make an autonomous DNA nanomechanical device • that executes cycles of motion • (either rotational or translational or both) • without external environmental changes.
Our Results: Designs for the first autonomous DNA nanomechanical devices that execute cycles of motion without external environmental changes. • Our two DNA Motor Devices: • Walking DNA device, • O Uses ATP consumption by DNA ligase in conjunction with restriction enzyme operations. • Rolling DNA device • O Uses hybridization energy • These DNA devices translate across a circular strand of ssDNA and rotate simultaneously. • Generate random bidirectional movements that acquire after n steps an expected translational deviation of O(n1/2).
Energy sources that can fuel DNA movements: • ATP consumption by DNA ligase in conjunction with restriction enzyme operations • (ii) DNA hybridization energy in trapped states • (iii) kinetic (heat) energy
Walking DNA Autonomous Nanomechanical Device: • requires no temperature changes. • Energetics: Uses ATP consumption by DNA ligase in conjunction with restriction enzyme operations. • Achieves random bidirectional translational and rotational motion around a circular ssDNA strand.
Walking DNA Device Construction: • The Road: • a circular repeating strand R of ssDNA • written in 5’ to 3’ direction from left to right. • consists of an even number n of subsequences, which we call steppingstones, indexed from 0 to n-1 modulo n. • The ith steppingstone consists of a length L (where L is between 15 to 20 base pairs) sequence Ai of ssDNA. • In our constructions, the Ai repeat with a period of 2. • The ith Walker: • A unique a partial duplex DNA strand Wi • with 3’ ends i-1 and i that are hybridized to consecutive i-1th andith steppingstones Ai-1 and Ai,
The Goal of the Device Construction: • Bidirectional, translational movement • both in the 5’ to 3’ direction (from left to right) and • vise versa (in the 3’ to 5’ direction) on the road. • The ith walker Wi will reform to another partial duplex DNA strand called the i+1th walker Wi+1 which is: • shifted one unit over to the left or the right. • Cycle back in 2 stages, so that Wi+2 = Wi for each stage i.
To achieve the movements • Use 2 distinct types of restriction enzymes. • Use DNA ligase: • provides a source of energy (though ATP consumption) and • a high degree of irreversibility. • Simultaneous Translational and Rotational Movements. • Secondary structure of B-form dsDNA: • Rotates 2 radians every approx 10.5 bases) • So in each step of translational movement, the walker rotates 1/10.5 around the axis of the road.
Notation: • (i)use superscript R to denote the reverse of a sequence, and • (ii) use overbar to denote the complement of an ssDNA sequence. • Oglionucleotides used in the Walking DNA Construction: • For i = 0, 1, we define ssDNA: • Bi • Ci • Ai • distinct oglionucleotides of low annealing cross-affinity. • To cycle back in 2 stages, subscripts of Ai Bi Ci are taken modulo 2 • Ai+1 = Ai-1 • Bi+1 = Bi-1 • Ci+1 = Ci-1
Avoiding Unwanted Interactions: • To ensure there is no interaction between a walker and more than one distinct road at a time: • o we use a sufficiently low road concentration and solid support attachment of the roads. • To ensure there is no interaction between a road and more than one walker: • o we use a sufficiently low walker concentration.
Definition of the Walker Wi • We inductively assume that ith walker Wi has: • the 3’ end i-1 hybridized to steppingstone Ai-1 on the road. • the 3’ end i hybridized to steppingstone Ai on the road. • Definition of the Stepper Si • The ith steppingstone Ai subsequences will hybridize with a complementary subsequence i of the ith stepper Si. • We assume that this occurs at each steppingstone, except the steppingstones where the walker’s ends are hybridized.
Hybridization of the Walker to steppingstones of the Road: • The ith steppingstone Ai subsequences will hybridize with a complementary subsequence i of the ith stepper Si. • We assume that this occurs at each steppingstone, except the steppingstones where the walker’s ends are hybridized.
The Walker Wi • We use a type two restriction enzyme that: • matches with the duplex subsequence containing Ci-1Bi-1 and its complement i-1i-1 within Wi, and • then cleaves Wi just before i and just after Ci. • Restriction Enzyme Cleavage of the Walker:
The Restriction Enzyme Cleavage of the Walker: • Resulting Products of Cleavage: • A ith truncated walker TWi same as • still attached to the ith steppingstone Si • with an ssDNA overhang (Ci)R at one 3’ end • (2) The i-1th stepper Si-1 • still attached to the i-1th steppingstone Si-1 • with an ssDNA overhang at one 3’ end.
The Reformation of the Walker. • The i+1th stepper strand Si+1 is already hybridized with a complementary subsequence i+1 of i+1th stepper Si+1. • This i+1th stepper strand Si+1 can also hybridize with the truncated walker TWi at their i and Ci ssDNA overhangs • The DNA ligase concatenates the strands • Resulting transformation of truncated walker TWi into i+1th walker Wi+1 • with its 3’ ends hybridized to consecutive steppingstones Ai and Ai+1 .
Possible Movements of the Walker: • (1) Forward: • (2) Stall: The cleavage operation can be reversed by re-hybridization • (3) Reversal: The walker has two possible (dual) restriction enzyme recognition sites which can result in a reversal of movement. f f f f f f f f f
Rolling DNA Autonomous Nanomechanical Device: • requires no temperature changes. • makes no use of DNA ligase or any restriction enzyme • it uses instead the hybridization energy of DNA in trapped states: Energetics: • uses fuel DNA strands to store energy • uses the application of DNA catalyst techniques to harness energy • liberates DNA from loops conformations into lower energy conformations • Achieves random bidirectional motion around a circular ssDNA strand.
Oglionucleotides used in the Rolling DNA Construction. • Let A0, A1, B0, B1 each be distinct oglionucleotides: • of low annealing cross-affinity, • consisting of L (L can be between 15 to 20) bases pairs. • Let a0, a1 be oglionucleotides • derived from A0, A1 by changing a small number of bases, • so their annealing affinity with 0R, 1Rrespectively is somewhat reduced, but still moderately high. • Strong Hybridization: • Hybridization between A0 and reverse complementary sequence 0R (or between A1 and reverse complementary 1R) • Weak Hybridization: • Hybridization between a0 and 0 R (or between a1 and 1R) • Key Idea: • A strong hybridization is able to displace a weak hybridization.
Rolling DNA Device • The Road: an ssDNA • with a0, a1, a0, a1, a0, a1, … in direction from 5’ to 3’, • consisting of a large number of repetitions of the sequences a0, a1. • The Wheel: a cyclic ssDNA • of base length 4L • with 0R,1R,0R, 1Rin direction from 5’ to 3’ • this corresponds to 1, 0, 1, 0 in direction from 3’ to 5’. • Type 0 Wheel Position Type 1 Wheel Position • Note: the wheel DNA strand is intertwined with the road strand of DNA.
Avoiding Unwanted Interactions. • To ensure there is no interaction between a wheel and more than one distinct road at a time (e.g., so the wheel is not sandwiched between two road strands): • we use a sufficiently low road concentration and solid support attachment of the roads. • (2)To ensure there is no interaction between a road and more than one wheel: • we use a sufficiently low wheel concentration.
Wheel Movement Fueled by Heat Energy Similar to Branch Migrations Very Slow Wheel Movement Fueled by DNA Hybridization: Faster Used by Yurke and Turberfield [YTM+00,YMT00,TYM00] for DNA tweezer nanomechanical devices but they require heat cycling We use the hybridization energy of DNA fuel loop strands: o We require no external environmental changes to induce repetitions of the motions by our DNA devices (no heat cycling). o We apply DNA catalyst techniques for liberating DNA from these loop conformations. o We harness their energy as they transition into lower energy conformations.
DNA Fuel Loop Strands • Type 0 Initial • Primary Fuel Strand Loop Configuration • Type 0 Initial • Complementary Fuel Strand Loop Configuration • Type 1 Primary and Complementary Fuel Strands have 0 and 1 switched. • Duplex DNA: complete hybridization of the type 0 • primary and complementary type 0 fuel strands f f f f f f
Duplex DNA: complete hybridization • of the type 0 primary and complementary type 0 fuel strands • Energetics of the Fuel Strands. • The Duplex DNA resulting from hybridization of the primary and complementary fuel strands of a given type has lower free energy • o lowest energy equilibrium state • Over a sufficiently long time interval: • o the free energy will drive these two species to Duplex DNA • By setting a sufficiently low temperature, • o that equilibrium duplex state can be made to take any given time duration to reach on the average.
The Sequence of Events of a Feasible Movement of the Wheel. • Initially Suppose: the wheel is in type 0 position with respect to the road. • Hybridizations of a 0th primary fuel strand: • Initial Hybridization of of the second segment A0 of the 0th primary fuel strand with the reverse complementary segment 0R of the wheel. • Extension of that initial hybridization to a hybridization of two first segments A1, A0 of the 0th primary fuel strand with the consecutive reverse complementary segments 1R0R of the wheel. • Consequences: • The wheel moves by one segment in the 5’ direction along the road, effecting a transition of the state of the wheel from the type 0 position to type 1 position. • Displacement of the prior hybridization of the 5’ end segment A1 with its 3’ end segment 1R of the primary fuel strand, which now is exposed.
The Sequence of Events of a Feasible Movement of the Wheel. • (2) Hybridizations of a type 0 complementary fuel strand: • Hybridization with reverse complementary subsequences of the type 0 primary fuel strand, • first at that fuel strand’s newly exposed 3’ end segment A1R • then at B0. • Formation of a type 0 fuel strand duplex removes the type 0 fuel strands from the wheel, completing the step. • .
Possible Movements of the Walker: • (1) Forward:Type 0 Wheel Position Type 1 Wheel Position • (2) Stall: Type 0 Wheel Position Type 0 Wheel Position • (3) Reversal: Type 1 Wheel Position Type 0 Wheel Position f f f f f f f f f
Conclusion: We have given two designs for • Autonomous Bidirectional DNA Nanomechanical Devices: • (1)Walking DNA Device: Use DNA ligase & restriction enzymes. • Rolling DNA Device: No Use of DNA ligase or restriction enzymes.
Expected Drift Via Random Translational Movement: • Both Devices provide random, bidirectional translational movements along the road. • Due to the symmetry of the constructions, both translational movements have equal probability in either direction. • By the theory of random walks in 1 dimension (Feller [F82]) the expected deviation after n steps is O(n1/2). • Fixing Translational Movement by Latching: • The designs can be modified to include a “latching mechanism” that fixes the device(walker or wheel) position at specified locations on road. • Modifications to allow for Latching: • appending to each 3’ end of the device an additional “latching” sequence and also • inserting the complements of these “latching” sequences at a specified pair of locations along the road, • This fixes (via their hybridization) the device’s location once the locations are reached and these “latching” hybridizations occur.
Use of these DNA Autonomous Nanomechanical Devices: • can be incorporated at multiple sites of larger DNA nanostructures such as self-assembled DNA lattices. • used to induced movements to hold state information and to sequence between distinct conformations. • Potential Applications. • Array Automata: The state information could be stored at each site of a regular DNA lattices, and additional mechanisms for finite state transiting would provide for the capability of a cellular array automata. (b) Nanofabrication: These capabilities might be used to selectively control nanofabrication stages. The size or shape of the lattice may be programmed through the control of such sequence-dependent devices and this might be used to execute a series of foldings (similar to Japanese paper folding techniques) of the DNA lattice to form a variety of 3D confirmations and geometries.
DNA Lattices A New, Powerful Technology for Rendering Patterns at the Molecular LevelA 2D DNA lattice is constructed by a self-assembly process:--Begins with the assembly of DNA tile nanostructures: - DNA tiles of size 14 x 7 nanometers - Composed of short DNA strands with Holliday junctions - These DNA tiles self-assemble to form a 2D lattice:-The Assembly is Programmable: -Tiles have sticky ends that provide programming for the patterns to be formed. -Alternatively:tiles self-assemble around segments of a DNA strand encoding a 2D pattern. - Patterning: Each of these tiles has a surface perturbation depending on the pixel intensity. -pixel distances 7 to 14 nanometers -not diffraction limited Key Application:Molecular robotic components
Applications of Molecular Motors to to DNA arrays: • Manipulation of molecules using molecular motor devices arranged on DNA tiling arrays. • Molecular Babbage Machines: • A DNA array of motors, may offer a mechanism to do DNA computation of arrays whose elements (the tiles) hold state. • Parallel Cellular Automata computations may be executed: • arrays of finite state automata each of which holds state. • The transitions of these automata and communication of values to their neighbors might be done by conformal (geometry) changes, again using this programmability. • Cellular Automata can do computations for which tiling assemblies would have required a further dimension.
Challenges in Molecular Robotics • Challenge: Re-Engineering Biological Molecular Motors • Construction of these biological molecular motors and their linking chemistry to DNA arrays: • Protein motors are modular and can be re-engineered to accomplish linear or rotational motion of essentially any type of molecular component. • Motor proteins have well known transcription sequences. • There are also well known proteins (binding proteins) that provide linking chemistry to DNA. • Protein motors and attached linking elements might be synthesized from sequences obtained by concatenation of these transcription sequences. • Challenge: Programmable Sequence-Specific Control of NanoMechanical Motion. • an array of molecular motors would be more useful if they can be selectively controlled. • Manipulate specific molecules: do chemistry at chemically identical but spatially distinct sites.
Key Open Problem • in thedesign of Autonomous Nanomechanical Devices: • A DNA Device achieving Unidirectional Movement (translational or rotational) • Conjecture: • Will need to use irreversible reactions (e.g., ligation) • Another Approach: • The design of Autonomous Nanomechanical Devices by use of Protein Motors
Biological Protein Motors: manufactured by expression of protein motors and linkers ADP Protein Motor [Montemagno, et al,99] (rotational movement) • ATP synthase and ADP act as rotary motors, coupling proton flux through a membrane with the phosphorylation of ADP to ATP. Axonemal Dynein Motor [Taylor,2000] (rotational movement) Kinesin [Stracke, 99] walks on microtubules • Kinesin acts as a molecular walking machine, translocating itself (and any attached components) in step-wise fashion along a microtubule. Each step along the microtubule consumes one ATP molecule.
Motor Ab DNA tile DNA Tile Lattice for Templating Molecular Motors (with Dan Kenan, Duke) A bifunctional antibody (Ab) is shown bound to a DNA aptamer on a tile and to a motor protein, thus immobilizing the motor onto the tile. An example DNA lattice More complex patterns of motors on lattices can allow for sophisticated molecular robotics tasks.