Download
1 / 19
210 likes | 454 Views
System A. y(t) = Output signal. Input signal = x(t). y 1 (t). x 1 (t). y 2 (t). x 2 (t). System B. y M (t). x N (t). Lecture #9 EGR 261 – Signals and Systems. Read : Ch. 1, Sect. 1-4, 6-8 in Linear Signals & Systems, 2 nd Ed. by Lathi. Systems

E N D
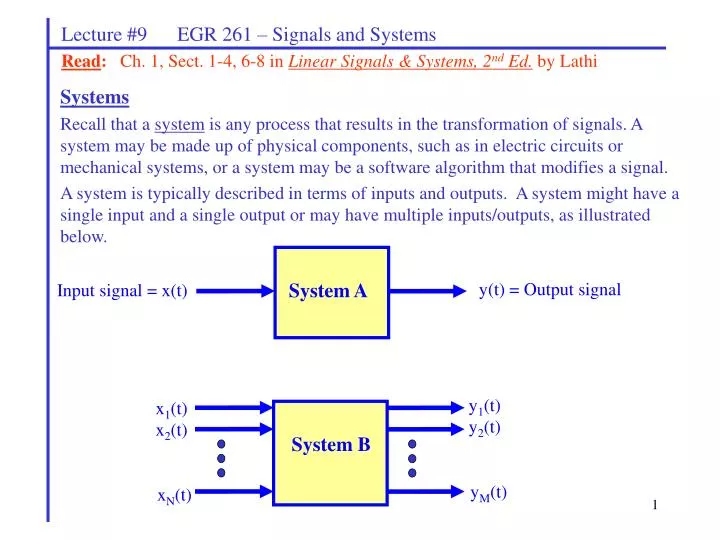
System A y(t) = Output signal Input signal = x(t) y1(t) x1(t) y2(t) x2(t) System B yM(t) xN(t) Lecture #9 EGR 261 – Signals and Systems Read: Ch. 1, Sect. 1-4, 6-8 in Linear Signals & Systems, 2nd Ed. by Lathi Systems Recall that a system is any process that results in the transformation of signals. A system may be made up of physical components, such as in electric circuits or mechanical systems, or a system may be a software algorithm that modifies a signal. A system is typically described in terms of inputs and outputs. A system might have a single input and a single output or may have multiple inputs/outputs, as illustrated below.
Lecture #9 EGR 261 – Signals and Systems System Analysis The analysis of systems is an important part of this course. Analysis often involves determining systems for given inputs. Analysis might involve different methods as well as analysis in different domains (such as in the time domain or the frequency domain). Example: Analyze a series RC circuit in the s-domain to determine the output VC(s) as a function of a general input, Vin(s).
Lecture #9 EGR 261 – Signals and Systems • Classification of Systems • Systems may be classified broadly in the following categories: • Linear and non-linear systems • Time-invariant (or constant parameter) and time-varying systems • Static (instantaneous or memoryless) or dynamic (with memory) systems • Causal and noncausal systems • Continuous-time and discrete-time systems • Analog and digital systems • Invertible and noninvertible systems • Stable and unstable systems
3 2 + + Input = x(t) = 10 V 6 _ 5 Vout = y(t) = output _ Lecture #9 EGR 261 – Signals and Systems • Classification of Systems • 1. Linear and non-linear systems • A system is considered to be linear if it satisfies two properties: • Homogeneity (or scaling) • Additivity Homogeneity (or scaling) Consider a system with input x(t) and output y(t), where y(t) = f(x(t)). A system satisfies the homogeneity property if the output y(t) is proportional to the input x(t) as indicated by the following relationship. Or, if the input is increased k-fold, then the output is also increased k-fold, where k is a real or imaginary number. Example: For the circuit below, if the input voltage doubles, the output voltage doubles. Or if the input is multiplied by k, the output is multiplied by k. So the circuit satisfies the homogeneity property.
3 3 2 2 + + + + x1 x2 _ _ 6 6 y1 y2 5 5 _ _ 3 2 + + x1+x2 _ 6 y1+y2 5 _ Lecture #9 EGR 261 – Signals and Systems Additivity A system satisfies the additivity property if the output y(t) can be determined by the algebraic sum of the outputs due to each input acting separately (with all other inputs set to zero). This relationship can be expressed by: Example: The circuit below satisfies the additivity property since: if y1 is the output when the input is x1, and y2 is the output when the input is x2, then y1 + y2 will be the output when the input is x1 + x2.
Lecture #9 EGR 261 – Signals and Systems Superposition Sometimes the homogeneity property and the additivity property are combined to form the superposition property. Thus a system is linear if it satisfies the superposition property shown below: Homogeneity Superposition Additivity Example: A system is described by the relationship y = mx + b. Is the system linear? (Hint: Test for homogeneity and additivity)
Lecture #9 EGR 261 – Signals and Systems Example (Exercise E1.11): A system is described by the relationship y(t) = Re{x(t)}. (Hint: Test for homogeneity (try k = j) and additivity.) Example (Exercise E1.12): Show that a system described by the following equation is linear: (Hint: Test for superposition.)
Lecture #9 EGR 261 – Signals and Systems Systems described by linear differential equations The text develops the fact that any systems that can be described by a linear differential equation of the form shown below is a linear system: • Response to a Linear System • If a system is linear, then the additivity property indicates that its output is the sum of • the components due to its inputs (with the other inputs set to zero). Suppose then that • a system’s output is due to: • the input, x(t), to the system • the initial conditions (state) of the system. • Therefore, the output of the system can be expressed as: Total response = zero-input response + zero-state response where: zero-input response = output due to initial conditions only (with input x(t) = 0) zero-state response = output due to input only (with zero initial condition)
Lecture #9 EGR 261 – Signals and Systems • Example: • Recall from EGR 260 that the response to a 1st-order RC circuit with DC sources has the form: • y(t) = B + Ae-t/RC • The output could be evaluated using the value of y(t) at two points (i.e., y(0) and y()) • Solve for B and A in terms of y(0) and y( ) • Express y(t) in terms of the zero-state response and the zero-input response
+ R y(t) x(t) C _ Lecture #9 EGR 261 – Signals and Systems Example: The circuit shown below is Figure 1.26 from Linear Systems and Signals, 2nd Edition, by Lathi. Express the output y(t) in terms of the zero-state response and the zero-input response.
Lecture #9 EGR 261 – Signals and Systems • Classification of Systems • 2. Time-invariant (or constant parameter) and time-varying systems • Systems whose parameters do not change with time are time-invariant systems. • In a time-invariant system, delaying the input results in a delay in the output, or • if y(t) = f(x(t)) then y(t – T) = f(x(t-T)) • The relationship above indicates that the delayed output will look exactly like the • original output, other than being delayed by T seconds. • Notes: • Networks that are composed of RLC elements and other commonly used active elements such as transistors are time-invariant systems. • Networks that can be described by a linear differential equation of the form below are time-invariant systems.
Lecture #9 EGR 261 – Signals and Systems Example: If a system output is represented by y(t) = 10e-tu(t), show that the system is time-invariant. Sketch the original output and the delayed output. Does the delayed output have the same form as the original output?
+ + R1 R + + y(t) y(t) x(t) x(t) R2 C _ _ _ _ Lecture #9 EGR 261 – Signals and Systems Classification of Systems 3. Static (instantaneous or memoryless) or dynamic (with memory) systems Static system – a static system (or instantaneous or memoryless) is a system where the output at any instant t depends only on its input at that instant. Example: Circuits composed only of resistors are static systems. Find y(t). Dynamic system – a dynamic system is one where the output at any instant depends on both present and past inputs. Example: Circuits with inductors and capacitors are dynamic systems. Find y(t). Note: We will generally be concerned with dynamic systems. Static systems can be viewed as a special case of dynamic systems.
Lecture #9 EGR 261 – Signals and Systems Classification of Systems 4. Causal and Non-Causal Systems A causal system is one for which the output at to depends only on the input for t < to. A non-causal system is one for which the output could also depend on future inputs. Any practical system that operates in real time must be causal. A causal system is also called a realizable system. A non-causal system is also called a non-realizable system.
Lecture #9 EGR 261 – Signals and Systems Classification of Systems 5. Continuous-Time and Discrete-Time Systems Continuous-Time Systems As mentioned earlier, signals defined over a continuous range of time are continuous-time signals (denoted x(t), y(t), etc). Systems whose inputs and outputs are continuous-time signals are continuous-time systems. Discrete-Time Systems Signals only defined at discrete instants of time (t0, t1, t2, …) are discrete-time signals (x[0], x[1], x[2], etc.) Systems whose inputs and outputs are discrete-time signals are discrete-time systems. A digital computer is an example of a discrete time system. Continuous-time signals are sometimes “sampled” at regular intervals in order to produce discrete-time signals which can then be processed using a computer, as illustrated below. Reference: Linear Signals and Systems, 2nd Edition, by Lathi.
y1 x1 x1 y1 y2 x2 x2 X (Domain) Y (Co-domain) X (Domain) Y (Co-domain) Invertible System Non-invertible System Lecture #9 EGR 261 – Signals and Systems Classification of Systems 6. Analog and Digital Systems Analog and digital signals were discussed earlier. Systems whose inputs and outputs are analog signals are analog systems. Systems whose inputs and outputs are digital signals are digital systems. Note that a digital computer is a digital system as well as a discrete-time system. 7. Invertible and Noninvertible Systems A system is invertible if we can obtain the x(t) back from the corresponding output y(t) by some operation. This implies that there must be a 1:1 mapping between inputs and outputs (i.e., every input must have a unique output) as illustrated below.
x(t) y(t) x(t) S Si Lecture #9 EGR 261 – Signals and Systems A system S is invertible if there exists some system Si such that x(t) can be regenerated from y(t). Example: A system is represented by y(t) = 2x(t) (an ideal amplifier with a gain of 2). Is the system invertible? Example: A system is represented by the relationship y(t) = [x(t)]2. Is the system invertible?
Lecture #9 EGR 261 – Signals and Systems Application – Invertible systems: Inverse systems are important in signal processing as we may distort a signal during processing and then need to restore the signal (undo the distortion) after processing. Example: Dolby recording system (discuss). Classification of Systems 8. Stable and Unstable Systems A system is stable (externally) if for every bounded input there is a bounded output. This type of stability is also known as Bounded-Input Bounded-Output (BIBO) stability. Example: Is a system represented by y(t) = [x(t)]2 BIBO stable? Suppose x(t) is limited to the range -10 < x(t) < 10?









