Download
1 / 14
160 likes | 329 Views
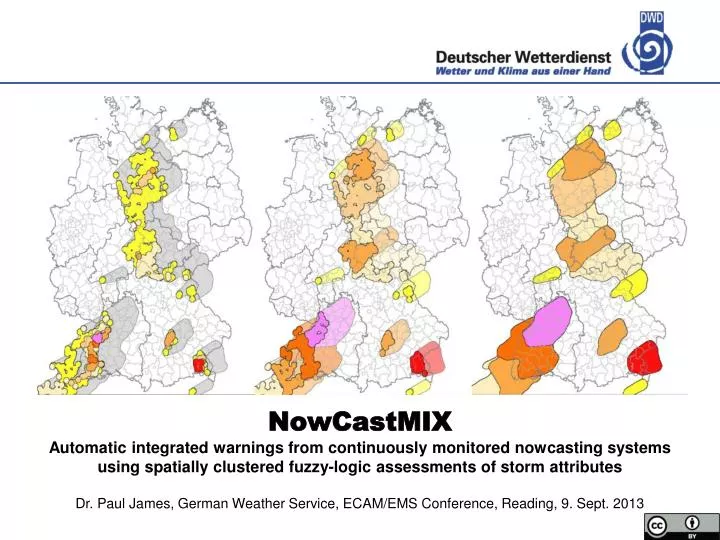
NowCastMIX Automatic integrated warnings from continuously monitored nowcasting systems using spatially clustered fuzzy-logic assessments of storm attributes. Dr. Paul James, German Weather Service , ECAM/EMS Conference, Reading, 9. Sept. 2013. NowCastMIX in AutoWARN.

E N D
NowCastMIXAutomatic integrated warnings from continuously monitored nowcasting systems using spatially clustered fuzzy-logic assessments of storm attributes Dr. Paul James, German Weather Service, ECAM/EMS Conference, Reading, 9. Sept. 2013
NowCastMIX in AutoWARN • The AutoWARN process at the DWD monitors several systems automatically for potential warning situations on different time scales. • Warning polygons are sent to duty meteorologists for possible modification before products are generated. • NowCastMIX integrates all data from nowcasting systems • Consistent, optimised and intelligent warning solution
NowCastMIX in AutoWARN • NowCastMIX monitors several nowcasting systems on a 5 minutes update cycle • Radar products, lightning, surface obs., NWP model outputs for background • Data mapped onto a 1 x 1 km grid with assessment of cell motion vector field • Storm severity assessments using a fuzzy-logic method • Spatial and temporal optimisation using clustering techniques • Warning polygons covering the next 60 minutes produced and sent on to AutoWARN
NowCastMIX - Overview Warning events: Thunderstorms / Rain • Different warning events are given an code number (ii) (e.g. „31“) • 10 thunderstorm and 3 torrential rain event types need to be monitored in AutoWARN • The thunderstorm severity depends on the presence (and magnitude) of these attributes: • Severe Gusts • Torrential Rain • Hail The 10 Thunderstorm and 3 Torrential rain events
NowCastMIXCell motion vector field • Background cell motion vector field (CVF) is constructed using the following sources: • Pattern-Matching of radar echoes in consecutive images -> motion vectors • Explicit cell tracking vectors* (KONRAD and CellMOS systems) (*mapped with a Gaussian distribution) • Form weighted mean -> CVF • Loop over all input tracking vectors to remove possible erroneous outliers • Successive improvement of CVF 13:15 UTC, 22.06.2011 Cell motion vector field
NowCastMIXConstruction of warning cones • Warning cones are created, opening up in the direction of cell motion • 3 possible triggers for creating a cone: • KONRAD Cell ( Radar echoes > 46 dBZ ) • CellMOS Cell ( Radar echoes > 37 dBZ + Lightning Strike ) • Lightning Strike with weaker radar echoes • Fuzzy Logic applied at the cell centre to estimate storm severity • Attribute strength (Gusts, Hail, Rain) as a function of input data • Weighting function in cases where two or more cones overlap – higher severity preferred • Total cone length = 60 min (as function of cell speed) • Initial radius = 10km, Expansion angle = 7,5 degrees
NowCastMIXIntegration of station reports • In some cases the automatically determined thunderstorm severity may not be able to capture the characteristics of the storm sufficiently • To reduce the risk of missing very severe weather, real-time synoptic station reports are routinely monitored by NowCastMIX • These report e.g. measured gust speeds, hail occurrence, recent rainfall totals etc. • The likely current location of the severe weather event is estimated using the background cell motion vector field • Note that a certain time has typically elapsed since the reported weather started • A certain temporal and spatial uncertainty typically exists, depending on the type of severe weather being reported • The severity levels of warnings in this region can be raised if necessary Cell motion vector Station Current region of relevance
NowCastMIXOptimization of Warnings • Optimal warnings need to find a balance between: • In nowcasting you cannot have both at the same time! • NowCastMIX would tend by nature to be over-precise • An optimal balance is approached via a clustering method Precision / Accuracy Realistic, strictly correct Complex, over detailed and rapidly changing warnings. Hard for duty meteorologists to assess and process. Hard for customers to understand and assimilate Workability / Usefulness Smoother in space and time. Easier to process for the duty meteorologists, easier for customers to assimilate. Locally less precise, some details may be left out. Greater danger of systematic biases (e.g. over warning)
NowCastMIXClustering • Clusters (cell groups) are formed with the DBSCAN algorithm • Examining all cells in a time window covering the last 20 minutes • The highest severity value in a cluster is mapped onto all cells in that cluster • High severity levels are thus held up for at least 20 minutes • Results in a certain temporal smoothing • Problem: The clusters themselves sometimes change significantly from one run to the next, 5 minutes later, resulting in a new source of temporal noise on larger scales • A cluster ensemble (up to ~600) is created, using differing randomly perturbed cell positions (up to 6km shifts) • To improve computational efficiency the directions of the random perturbations are successively biased towards more useful sectors as the ensemble members are generated (Adaptive Clustering Ensemble) • The clustering member which is finally used is that which is most similar to the clustering which was used 5 minutes earlier
NowCastMIX Core Technology5. Clustering example Dr. P. James (Deutscher Wetterdienst, Offenbach, Germany) – ECAM/EMS Conference, Reading, UK, 9. Sept. 2013
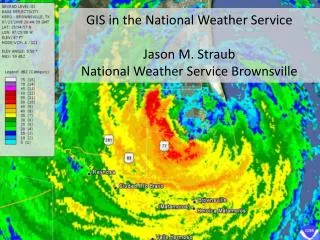
NowCastMIX – From analysisto warning polygons 14:05 to 15:05 UTC, 22.06.2011 Analysis* + Warning areas * 20 minute time window (13:45-14:05) Clusters + Warning polygons Warning situation for the next hour Dr. P. James (Deutscher Wetterdienst, Offenbach, Germany) – ECAM/EMS Conference, Reading, UK, 9. Sept. 2013
NowCastMIXOutlook • Further refinement of clustering techniques to optimise warning proposals • Inclusion of further data sources (e.g. rapid-scan based satellite products) • Can early warnings be given before the first lightning or radar signals are occurring? • Feedback from verification results and from assessments by duty meteorologists • Parameter optimisation, further tuning of fuzzy logic sets • Expansion of the warning domain to cover wider area of W. Europe (e.g. FAB EC) • Winter nowcasting (snow, freezing rain) • Radar-based detection (snow, precip.) combined with surface freezing indicators • NWP-based snow forecasts and temperature profiles • Fuzzy logic combinations of such information
NowCastMIX Thanks for your attention ! Questions?