Download
1 / 39
400 likes | 545 Views
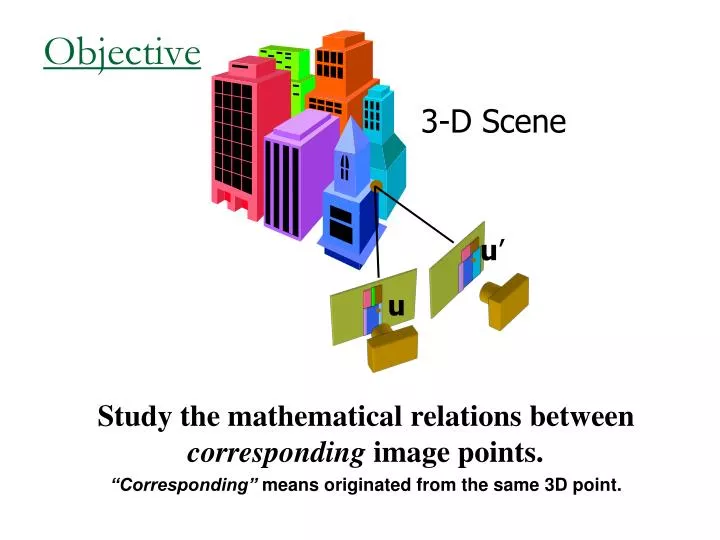
Objective. 3-D Scene. u ’. u. Study the mathematical relations between corresponding image points. “Corresponding” means originated from the same 3D point. Two-views geometry Outline. Background: Camera, Projection models Necessary tools: A taste of projective geometry

E N D
Objective 3-D Scene u’ u Study the mathematical relations between corresponding image points. “Corresponding”means originated from the same 3D point.
Two-views geometryOutline • Background: Camera, Projection models • Necessary tools: A taste of projective geometry • Two view geometry: • Planar scene (homography ). • Non-planar scene (epipolar geometry). • 3D reconstruction (stereo).
A few words about Cameras • Camera obscura dates from 15th century • First photograph on record shown in the book – 1826 • The human eye functions very much like a camera
History Camera Obscura "Reinerus Gemma-Frisius, observed an eclipse of the sun at Louvain on January 24, 1544, and later he used this illustration of the event in his book De Radio Astronomica et Geometrica, 1545. It is thought to be the first published illustration of a camera obscura..." Hammond, John H., The Camera Obscura, A Chronicle
The first “photograph”www.hrc.utexas.edu/exhibitions/permanent/wfp/ Joseph Nicéphore Niépce.View from the Window at Le Gras.
A few words about Cameras • Current cameras contain a lens and a recording device (film, CCD, CMOS) • Basic abstraction is the pinhole camera
A few words about LensesIdeal Lenses Lens acts as a pinhole (for 3D points at the focal depth).
Regular Lenses E.g., the cameras in our lab. To learn more on lens-distortion see Hartley & Zisserman Sec. 7.4 p.189. Not part of this class.
Perspective Projection • Origin (0,0,0)is the Focal center • X,Y (x,y) axis are along the image axis (height / width). • Z is depth = distance along the Optical axis • f – Focal length
Projection P=(X,Y,Z) y f Y X f Z
Projection P=(X,Y,Z) y f Y X f Z
Orthographic Projection • Projection rays are parallel • Image plane is fronto-parallel • (orthogonal to rays) • Focal center at infinity
Scaled Orthographic Projection Also called “weak perspective”
Pros and Cons of Projection Models • Weak perspective has simpler math. • Accurate when object is small and distant. • Useful for object recognition. • When accuracy really matters (SFM), we must model the real camera (Pinhole / perspective ): • Perspective projection, calibration parameters (later), and all other issues (radial distortion).
Two-views geometryOutline • Background: Camera, Projection • Necessary tools: A taste of projective geometry • Two view geometry: • Planar scene (homography ). • Non-planar scene (epipolar geometry). • 3D reconstruction from two views (Stereo algorithms) Hartley & Zisserman: Sec. 2 Proj. Geom. of 2D. Sec. 3 Proj. Geom. of 3D.
Reading • Hartley & Zisserman: • Sec. 2 Proj. Geo. of 2D: • 2.1- 2.2.3 point lines in 2D • 2.3 -2.4 transformations • 2.7 line at infinity • Sec. 3 Proj. Geo. of 3D. • 3.1 – 3.2 point planes & lines. • 3.4 transformations
Why not Euclidian Geometry(Motivation) • Euclidean Geometry is good for questions like: what objects have the same shape (= congruent) Same shapes are related by rotation and translation
Why Projective Geometry (Motivation) Parallel lines meet at the horizon (“vanishing line”) Where do parallel lines meet?
Coordinates in Euclidean Line R1 Not in space 0 1 2 3 ∞
Coordinates in Projective Line P1 Take R2 –{0,0} and look at scale equivalence class (rays/lines trough the origin). Realization: Points on a line P1 “Ideal point” k(1,1) k(0,1) k(-1,1) k(2,1) -1 0 1 2 ∞ k(1,0)
Coordinates in Projective Plane P2 Take R3 –{0,0,0} and look at scale equivalence class (rays/lines trough the origin). k(0,1,1) k(1,1,1) “Ideal point” k(0,0,1) k(1,0,1) k(x,y,0)
Projective Line vs. the Real Line “Ideal point” k(1,1) k(0,1) k(-1,1) k(2,1) -1 0 1 2 ∞ k(1,0)
k(0,1,1) k(1,1,1) “Ideal line” k(0,0,1) k(1,0,1) k(x,y,0) Projective Plane vs Euclidian plane
2D Projective Geometry: Basics • A point: • A line: we denote a line with a 3-vector • Line coordinates are homogenous • Points and lines are dual: p is on l if • Intersection of two lines/points
Area of parallelogram bounded by u and v Cross Product Every entry is a determinant of the two other entries Hartley & Zisserman p. 581
Cross Product in matrix notation [ ]x Hartley & Zisserman p. 581
Example: Intersection of parallel lines Q: How many ideal points are there in P2? A: 1 degree of freedom family – the line at infinity
u’ u Projective Transformations
Perspective mapping Pencil of rays Transformations of the projective line A perspective mapping is a projective transformation T:P1 P1 Perceptivity is a special projective mapping. Hartley & Zisserman p. 632 Lines connecting corresponding points are “concurrent”
Perspectivities Projectivities Perspectivities are not a group L l2 l1
Projective transformations of the projective line Given a 2D linear transformation G:R2 R2 Study the induced transformation on the Equivalents classes. On the realization y=1 we get:
Properties: • Invertible (T-1 exists) • Composable (To G is a projective transformation) • Closed under composition • Has 4 parameters • 3 degrees of freedom • Defined by 3 points Every point defines 1 constraint
Ideal points and projective transformations Projective transformation can map ∞ to a real point
Euclidean Transformations (Isometries) Rotation: Translation:
Hierarchy of 2D Transformations Projective Affine Similarity Rigid (Isometry) Translation: Rotation: Scale Hartley & Zisserman p. Sec. 2.4