Download
1 / 33
330 likes | 460 Views
Thesis Project. Singularity-Invariant Transformations in Stewart-Gough Platforms: Theory and Applications. Thesis Advisor : Federico Thomas Tutor : Raúl Suárez. Contents. Introduction State of the art Kinematics Classifications Singularities Workspace and dexterity

E N D
Thesis Project Singularity-Invariant Transformations in Stewart-Gough Platforms: Theory and Applications Thesis Advisor : Federico Thomas Tutor : Raúl Suárez
Contents • Introduction • State of the art • Kinematics • Classifications • Singularities • Workspace and dexterity • Objectives and Contributions • General Objectives • Achieved Objectives/Publications • Work scheduling & Publications • Conclusions
Introduction Stewart-Gough Platform is a parallel manipulator consisting of a moving rigid platform and a rigid base connected with six extensible legs. In general, its forward kinematics and singularity analysis are difficult Is it possible to change the location of the attachments without altering singularities?
[20] B. Dasguptaa and T.S. Mruthyunjayab,“The Stewart platform manipulator: a review,” Mechanism and Machine Theory, Vol. 35, pp.15-40, 2000. State of the art Stewart-Gough Platform: prototypes [1] D. Stewart,“A platform with 6 degrees of freedom,” Proc. of The Institution of Mechanical Engineers, Vol.180, No. 15, pp. 371-386, 1965/66. [2] V.E. Gough and S.G. Whitehall,“Universal tyre test machine,” Proc. 9th Int. Tech. Congr. FISITA., Instn Mech. Engrs, pp. 117, 1962. Parallel manipulators (respect Serial Manipulators): -Greater rigidity. -Superior positioning capabilities. -Much better load/mass ratio (load is distributed on the legs). Since 1990’s, there has been a steady increase in research interest in the Stewart-Gough platform.
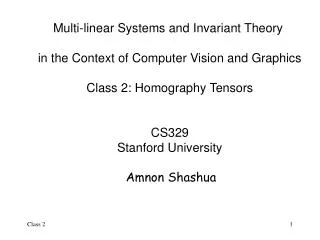
qi li pi FK IK [9] D. Lazard, “Stewart platforms and Grobner basis,” Proceedings of Advances in Robotics Kinematics, pp. 136-142, 1992. [10] F. Ronga and T. Vust, “Stewart platforms without computer?”,Preprint, Université de Genève, 1992 [11] M. Raghavan, “The Stewart platform of general geometry has 40 configurations,” Journal of mechanical design, Vol. 115, No. 2, pp. 277-282, 1993. i.Kinematics Configuration Space Workspace Inverse kinematics problem: Given the position and orientation of the mobile platform, find the legs lengths. Easy. You have the coordinates of all the points in the same reference. Compute the lengths with the Euclidean distance formula. Forward kinematics problem: Given the lengths of the 6 legs, find the position and orientation of the mobile platform. Several configurations are possible for a given set of lengths. No closed-form solution in general. Six sphere equations system must be solved. Intersection theory is used to prove that the maximum number of solutions is 40.
ii. Classifications Combinatorial representation using graphs Possible names: 3-3 3 platform points, 3 base points 3 / 2 / 1 tripod / 2 leg group / single leg Each graph represents the combinatorial class of manipulators with the same structure [14] J.C Faugère and D. Lazard, “Combinatorial classes of Parallel Manipulators”, Mechanism and Machine Theory, 1995
Classification based on Rigid Subcomponents Point-Line Point-Plane Line-Line Line-Plane Examples of one of the classes presented in [23] Existence of rigid subcomponents simplifies its analysis. Platforms in a class have -neither the same forward kinematics -nor the same singularity structure . [23] X. Kong and C.M. Gosselin, “Classification of 6-SPS Parallel Manipulators According to Their Components,” Proc. ASME Des. Eng. Tech. Conf., 2000.
[5] J-P. Merlet, “Singular Configurations of Parallel Manipulators and Grassmann Geometry,” The International Journal of Robotics Research, Vol. 8, No. 5, pp. 45-56,1989. Type I Type II SINGULARITIES iii.Singularities Plücker Coordinates of the leg lines [6] C. Gosselin and J. Angeles, “Singularity Analysis of Closed-Loop Kinematic Chains,” IEEE Transactions on Robotics and Automation, Vol. 6, No. 3, pp. 281-290, 1990. [24] B. Mayer St-Onge and C. Gosselin, “Singularity Analysis and Representation of the General Gough- Stewart Platform,” The International Journal of Robotics Research, Vol. 19, No. 3, pp. 271-288, 2000.
Architectural singularities Type III [7] O. Ma and J. Angeles, “Architecture Singularities of Platform Manipulators,” Proc. IEEE Intl. Conf. on Robotics and Automation, Vol. 2, pp. 1542-1547, 1991. With the prismatic joints locked, architecturally singular manipulators exhibit a self-motion. When legs are forming a linear complex independently of the leg lengths. When the attachments fulfill some metric relation Architectural singularities are directly related with projective invariants. [22] M.L. Husty and A. Karger, “Architecture Singular Parallel Manipulators and Their Self-Motions,” in Advances in Robot Kinematics, J. Lenarcic and M. M. Stanisic (eds.), Kluwer Academic Publishers, pp. 355-364, 2000. [33] A. Karger, “Architecture Singular Planar Parallel Manipulators,” Mechanism and Machine Theory, Vol. 38, pp. 1149-1164, 2003.
Architectural singularities Type III
iv.Workspace and dexterity Well-conditioned workspace Distance to singularities Error amplifications Manipulability ellipsoid Accuracy/dexterity of the robot Manipulability index Closeness to a singularity Condition number Criteria for optimal design Problems: Strong coupling between position and orientation. Must take into account singularity analysis and leg collision. All indexes depend on the chosen norm and units, and they all rely on the Jacobian matrix. [39] J-P. Merlet, “Jacobian, Manipulability, Condition Number, and Accuracy of Parallel Robots,” Journal of Mechanical Design, Vol. 128, pp. 199-206, 2006.
Contents • Introduction • State of the art • Kinematics • Classifications • Singularities • Workspace and dexterity • Objectives and Contributions • General Objectives • Achieved Objectives/Publications • Work scheduling & Publications • Conclusions
i.Objectives In general, moving the attachments modifies the singularity locus in an unexpected way. When the platforms contains rigid subassemblies, we can rearrange the legs so that the singularity locus is modified in a controlled way. Key points: - kinematics of the components are not modified. - the resultant Jacobian determinant is not modified, up to scalar multiplication. Singularity-invariant transformations derived from rigid components: Delta-transform Line-Plane transform Does any singularity-invariant Plane-Plane transformation exist?
Objectives: Applications of the SI transformations * Generate families of Stewart-Gough platforms with the same singularity locus. * Classify and characterize architectural singularities through singularity-invariant transforms. * Decouple the two problems of - location of the singularities in a given workspace - improving the dexterity in a given region of the configuration space. * Provide a tool to optimize in a design process -the dexterity or -avoid possible collisions between its legs without modifying the singularities. * Avoid multiple spherical joints. * Design reconfigurable platforms whose attachments can be modified statically or dynamically. -If a reconfiguration is done with a singularity-invariant transformation, the control of the platform is not increased by the fact of being reconfigurable. * Make contributions in the study of mathematical tools to deal with singularities: - Grassmann-Cayley algebra. - Geometric Algebra
ii. Achieved objectives Point-Line transformation: J. Borràs, F. Thomas and C.Torras, "On Delta-transforms,'' submitted to the IEEE Transactions on Robotics (second revision). • J. Borràs, F. Thomas and C. Torras, "Analyzing the Singularities of 6-SPS Parallel Robots Using Virtual Legs,'' Proc. II International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, pp. 145-150, 2008. • J. Borràs, F. Thomas and C. Torras, "Architecture Singularities in Flagged Parallel Manipulators,'' IEEE International Conference on Robotics and Automation, pp. 3844-3850, 2008. Line-Plane transformation: J. Borràs and F. Thomas, "Kinematics of the Line-Plane Subassembly in Stewart Platforms,'' accepted tothe IEEE International Conference on Robotics and Automation, 2009. • J. Borràs, F. Thomas, E. Ottaviano and M. Ceccarelli, "A Reconfigurable 5-DOF 5-SPU Parallel Platform,'' submitted to IEEE/ASME International Conference on Reconfigurable Mechanisms and Robots. Contributions on Grassmann-Cayley algebra dealing with singularities: J. Borràs, F. Thomas and C. Torras, "Straightening-Free Algorithm for the Singularity Analysis of Stewart-Gough Platforms with Collinear/Coplanar Attachments," submitted to Computational Kinematics.
Point-Line Transformation The length of the new leg can be found uniquely m n
Point-Line Transformation SINGULARITIES We got the first singularity invariant transformation!
Applying sequentially Applying sequentially several Delta-transforms, we obtain complex transformations.
Applying simultaneously Architectural Singularity Condition Can this factor be zero?
Line-Plane Component SINGULARITIES OF THE LINE-PLANE COMPONENT:
Line-Plane Component Let us consider the hypersurface in (x4,y4,z4) (x1,y1,z1) (x3,y3,z3) (x5,y5,z5) The same coefficients !! (x2,y2,z2)
Line-Plane Component We got the second singularity invariant transformation!!
Reconfigurable robot • J. Borràs, F. Thomas, E. Ottaviano and M. Ceccarelli, "A Reconfigurable 5-DOF 5-SPU Parallel Platform,'' submitted to IEEE/ASME International Conference on Reconfigurable Mechanisms and Robots.
Contents • Introduction • State of the art • Kinematics • Classifications • Singularities • Workspace and dexterity • Objectives and Contributions • General Objectives • Achieved Objectives/Publications • Work scheduling & Publications • Conclusions
Work Scheduling 2007
Publications J. Borràs, F. Thomas and C. Torras, "Straightening-Free Algorithm for the Singularity Analysis of Stewart-Gough Platforms with Collinear/Coplanar Attachments," submitted to Computational Kinematics. J. Borràs, F. Thomas, E. Ottaviano and M. Ceccarelli, "A Reconfigurable 5-DOF 5-SPU Parallel Platform,'' submitted to IEEE/ASME International Conference on Reconfigurable Mechanisms and Robots. J. Borràs, F. Thomas and C.Torras, "On Delta-transforms,'' submitted to the IEEE Transactions on Robotics (second revision). J. Borràs and F. Thomas, "Kinematics of the Line-Plane Subassembly in Stewart Platforms,'' IEEE International Conference on Robotics and Automation, 2009. J. Borràs and R. Di Gregorio, "Polynomial Solution to the Position Analysis of Two Assur Kinematic Chains with Four Loops and the Same Topology,'' Journal of Mechanisms and Robotics, to appear in 2009. J. Borràs, F. Thomas and C. Torras, "Analyzing the Singularities of 6-SPS Parallel Robots Using Virtual Legs,'' Proc. II International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, pp. 145-150, 2008. J. Borràs and R. Di Gregorio, "Direct Position Analysis of a Large Family of Spherical and Planar Parallel Manipulators with Four Loops,'' Proc. II International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, pp. 19-29, 2008. J. Borràs, F. Thomas and C. Torras, "Architecture Singularities in Flagged Parallel Manipulators,'' IEEE International Conference on Robotics and Automation, pp. 3844-3850, 2008. J. Borràs, E. Ottaviano, M. Ceccarelli, and F. Thomas, "Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities,'' Revista de la Asociación Española de Ingeniería Mecánica, Año 16, Vol. 2, pp. 1047-1052, 2008.
Conclusions We think that it is a new and original approach to singularity analysis. Singularity-invariant transformations can be useful to: Increase the number of known manipulators with closed-form kinematics Classify manipulators with respect to singularities Design reconfigurable robots Provide a tool to designers to optimize workspace or dexterity. Characterize architectural singularities with full geometrical meaning.