Download
1 / 51
520 likes | 728 Views
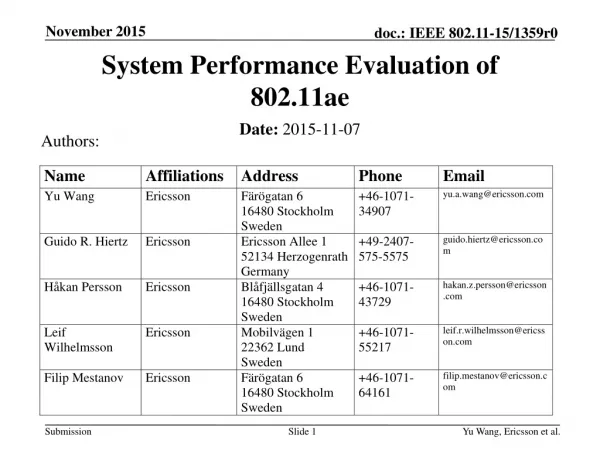
APCC2010 (Auckland, New Zealand) 31 Oct. - 3 Nov. 2010. Performance Evaluation of the Code Acquisition System using Pseudo-ternary M-sequences. Ryo ENOMOTO Hiromasa HABUCHI. Graduate School of Science and Engineering, IBARAKI University, Japan. H. ABUCHI LAB.

E N D
APCC2010 (Auckland, New Zealand) 31 Oct. - 3 Nov. 2010 Performance Evaluation of the Code Acquisition System using Pseudo-ternaryM-sequences Ryo ENOMOTO Hiromasa HABUCHI Graduate School of Science and Engineering, IBARAKI University, Japan H ABUCHI LAB. Communication System and Theory
Synchronization of the SS system Direct Sequence / Spread Spectrum (DS/SS) Demodulator Transmitter Data Decision Noise 1 CCG Cyclic Code Generator (CCG) 0 Timing Clock Tracking system • Synchronization system SW • Code acquisition Acquisition system • Code tracking Sync. system
Methods of improving synchronization system System Design Code Design Acquisition • Concatenatedsequence • Multi dwell slidingcorrelator • Maximum likelihood • estimation • M-MAJ sequence • JPL sequence • Matched filter Tracking • Manchester-coded • M-sequence • Increase of DLLarms • Pseudo-ternary • M-sequence • Modified Code Tracking Loop • IDLL
Purpose of this study We evaluate the synchronization system of the SS communication using pseudo-ternary M-sequence • Pseudo-ternary M-seq. (PTM) • Pseudo-ternary M-seq. (PTM) DS Demodulator Ref. PTM • Generating method • Properties of the sequence • Acquisition system Tracking system Ref. PTM • System structures • Average code acquisition time • Sliding correlator (SC) • SC with square detector SW Acquisitionsystem Ref. PTM • Tracking system (previous studies) Sync. System
Pseudo-Ternary M-sequence (PTM) Sequence Generator 7chips M-sequence (n=3) X-OR an a1 an-1 … Clock Level Convertor 1→+1 0→-1 +) M-sequence Gen. + PTM 1/2 Σ - Delay 1 Chip Pseudo-Ternary M-seq. {+,0,0,-,+,-,0} Add circuit
Properties of the PTM The pseudo-ternary M-sequence • has properties similar to the M-sequence (e.g. balance property, run length distribution) • shows the ideal auto correlation characteristicof the Manchester-coded M-sequence Auto correlation R(τ) 1 Pseudo-ternary M-seq. Manchester-coded M-seq. Side-lobe level( |τ| ≥ 2TC ) TC -TC 0 0 τ[sec] Pseudo-ternary M-seq. ±1/L Manchester-coded M-seq. -1/2 (Tc : chip duration, L : sequence length)
Properties of the PTM (Continue) Pseudo-ternary M-seq. • We can obtain a {0,1}-valued M-seq.by rectifying a Pseudo-ternary M-seq. • Cross correlation between {0,1}- valued M-seq. & {+1,-1}-valued M-seq.shows the pseudo-orthogonal relation Rectification {0,1}-valued M-seq. Cross correlation Pseudo-orthogonal {+1,-1}-valued M-seq.
Purpose of this study We evaluate the synchronization system of the SS communication using pseudo-ternary M-sequence ✔ • Pseudo-ternary M-seq. (PTM) DS Demodulator Ref. PTM • Generating method • Properties of the sequence • Acquisition system Tracking system Ref. PTM • System structures • Sliding correlator (SC) • SC with square detector SW • Average code acquisition time Acquisitionsystem Ref. PTM • Tracking system (previous studies) Sync. System
Sliding correlator Threshold Circuit (ZTH) To tracking system Pseudo-ternary M-sequence Pseudo-ternary M-seq. Gen. Clock Control • ZTH is set to middle point between peak value and maximal side-lobe level of a correlation function • We configure two thresholds to realize an acquisition that is independent of polarity of a received signal 1.0 0.75 Peak value 0.5 Max side-lobe -0.5 ZTH=±0.75 -0.75 -1.0 (Pseudo-ternary M-seq.) Auto correlation of the pseudo-ternary M-seq.
Sliding correlator with square detector Threshold Circuit (ZTH) To tracking system Pseudo-ternary M-sequence Clock Control {+1,-1}-valued M-seq. Gen. • A cross-correlation of this system shows the pseudo-orthogonal relationship. • {+1,-1}-valued M-seq. and Manchester-coded M-seq. • are NOT available as incoming signal. Peak value 1.0 1.0 Max side-lobe 0.5 ZTH=+0.5 Cross-correlation of the squared PTM and {+1,-1}-valued M-seq.
Performance evaluation (Sliding correlator) • Once the integrator output exceeds ZTH at the sync. point, we regard as the acquisition is success • Each trial continues until the acquisition is successful
Avg. acquisition time (Sliding correlator) Simulation results Good
Avg. acquisition time (Two systems) (SC) SC with square detector Simulation results Good
Conclusion We evaluated code acquisition system of DS/SS using pseudo-ternary M-sequence (Hashiura, 2009) Future work We will check the performance of the SC with square detector by the theoretical analysis
Comparison of the three sequences • {+1,-1}-valued M-sequence • Sequence Length : 7 • Chip duration : Tc • Bandwidth : B • Pseudo-ternary M-sequence • Sequence Length : 7 • Chip duration : Tc • Bandwidth : B • Manchester-coded M-sequence • Sequence Length : 14 • Chip duration : Tc/2 • Bandwidth : 2B
Tracking system Coherent DLL Cross correlation network (Early signal) IncomingSignal + Δ = 2/3 [chip] LoopFilter 0 - (Late signal) PTM Gen. Voltage Control Clock (VCC) (Early) +1/3 [chip] 0 (Late) -1/3 [chip] 0 S-curve D(τ) M-sequence -TC/3 0 TC/3 τ [sec]
Non-coherent acquisition system Threshold Circuit (ZTH) To tracking system Pseudo-ternary M-sequence Clock Control {+1,-1}-valued M-seq. Gen. Threshold Circuit (ZTH) To tracking system Pseudo-ternary M-sequence Clock Control Pseudo-ternary M-seq. Gen.
Odd-correlation of the PTM Correlation value
Odd-correlation of the {+1,-1}-M-seq. Correlation value
Odd-correlation of the Manchester-M-seq. Correlation value
Tracking performance (Theoretical analysis) Tracking error performance [chip2] k = Noise-bandwidth Signal-bandwidth Good
0.733) M-seq. (step=93)
Tracking Error Performance Noise-bandwidth k = Bandwidth of BPF Variance of Tracking Error[chip2] = 0.10 k = 0.01 2.2 [dB] 2.8 [dB] Eb/N0 [dB]
Properties of the PTM Auto correlation S-curve of the Pseudo-ternary M-seq. R(τ) 1 Pseudo-ternary M-sequence (Δ=2/3 chip) Manchester-coded M-sequence -TC TC [sec] 0 τ[sec] -1/2 Side-lobe level( |τ| ≥ 2TC ) Slope in the tracking area 3/TC 0 Pseudo-ternary M-seq. ±1/L Manchester-coded M-seq.
Synchronization of the SS system DS/SS with synchronization system Demodulator Transmitter Data Decision Noise 1 Timing Clock 0 0 Synchronization System • Synchronization Integrator output LTc × = • Out of Sync. (1chip) -Tc × =
Acquisition system Sliding correlator Integrator output Incoming Signal Threshold Circuit (ZTH) ZTH (PTM) Clock Control Pseudo-ternary M-seq. Gen. 0 Timing error Square System Incoming Signal Threshold Circuit (ZTH) To DLL (PTM) Clock Control {+1,-1}-valued M-seq. Gen. {+1,-1}-valued M-seq. and Manchester-coded M-seq. are NOT available as incoming signal.
BER performance Good
Spreading Code Sequences Designing the spreading code sequence is a key technology in the SS communication. Modified version of the M-sequences can be classified into 3 applications. Modified version of the M-sequence Autocorrelation Synchronization CDMA • Gold-seq. • GMW seq. • Kasami seq. • ZCZ seq. • Pseudo-orthogonal M-seq. • Ternary M-seq. • q-ary M-seq. • JPL seq. • M-MAJ seq. • Concatenated seq. • Manchester-coded • M-seq. Pseudo-ternary M-sequence
Properties of the Pseudo-ternary M-sequence • Periodic Autocorrelation • 0, +1 and -1 Balance • Run-Length Distribution • Periodic Cross-correlation
0, +1 and -1 Balance • Number of 1 and -1 are equal • Number of 0 is almost twiceasmany as the number of 1 and -1 • 1 and -1 are generatedalternately When L = 63 [chip] Pseudo-ternary M-sequence consists of 16 ones, 16 minus-ones and 31 zeros. (63 chips Pseudo-ternary M-sequence)
Run-Length Distribution Run A series of 0 or 1 or -1 grouped consecutively Distribution of Runs for a 127 chips (n=7) Pseudo-ternary M-seq. There are : • No runs of 1 and -1 of length 2 or more • runs of 0 (p : run length)
Periodic Cross-correlation Preferred pair M-sequence:3 values 0 : Integer part of α) ( Pseudo-ternary M-sequence : 9 values 0 31 chips Pseudo-ternary M-sequence (n = 5) ±2, ±4, ±6, ±8 and 0
Application of the Pseudo-ternary M-sequence for the Tracking Loop • Structure of the DS/SS receiver with code tracking loop • Evaluation of the code tracking performance
Structure of DS/SS Receiver Transmitter DS/SS Demodulator Envelope correlation network Early BPF ( )2 + Late - BPF ( )2 Oscillator Δ = 2/3 [chip] Pseudo-Ternary M-Seq. Gen. VCC LF Non-coherent Delay Lock Loop
Conclusion • Introduced properties of the Pseudo-ternary M-sequence • Periodic Autocorrelation • Zero One and Minus-one Balance • Run length distribution • Periodic cross-correlation • Evaluated the tracking error performance of the non-coherent DLL Tracking performance of the Pseudo-ternary M-sequence is better than the M-sequences.
Jitter performance Noise-bandwidth :BL • k = Bandwidth of the BPF :B Theoretical formula • Eb /N0 : Signal power to noise power ratio[dB]
Bit Error Rate performance Theoretical formula • Δ : Cross-phase difference • λ : Synchronization delay • σ2 : Jitter • Pw(λ) : BER taking the jitter into account
DLL using the Pseudo-ternary M-seq. EarlySignal BPF ( )2 + (+ Δ chip) × - LateSignal ( )2 BPF (-Δ chip) Pseudo-Ternary M-Seq. Gen. Loop Filter VCC
Decimated Pseudo-ternary M-seq. Decimated sequence : u[q] a1 a2 a3 a4 a5 a6 a7 Sequences formed by taking every qth bit of sequence u. u u u[3] u[11] u[3] 45(8) = 100101(2) Polynomial When traversed clockwise, u[5] u[17] Decimation by 3 u[15] Decimation by 5 Decimation relations L=31 [chip]
S-curve characteristic Δ = 4 [chip] : Periodic autocorrelation 2/Δ 2/Δ Δ: Phase deference of the Early signal and the Late signal
S-curve characteristic (2) Δ = 2 Δ = 1 Δ = 2/3 Δ = 1/2
S-curve (3) Δ = 2/3 -TC/3 -TC/3 τ[chip] τ[chip] TC/3 TC/3 49