Download
1 / 39
390 likes | 405 Views
Chapter 10 Simple Harmonic Motion and Elasticity. Heinrich Hertz (1857-1894). Periodic motion Periodic ( harmonic ) motion – self-repeating motion Oscillation – periodic motion in certain direction Period (T) – a time duration of one oscillation

E N D
Chapter 10 Simple Harmonic Motion and Elasticity
Heinrich Hertz (1857-1894) Periodic motion • Periodic (harmonic) motion – self-repeating motion • Oscillation – periodic motion in certain direction • Period (T) – a time duration of one oscillation • Frequency (f) – the number of oscillations per unit time, SI unit of frequency 1/s = Hz (Hertz)
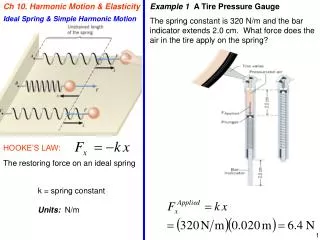
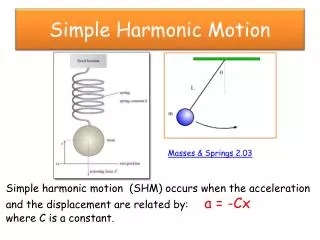
Motion of the spring-mass system • Hooke’s law: • The force always acts toward the equilibrium position: restoring force • The mass is initially pulled to a distance A and released from rest • As the object moves toward the equilibrium position, F and a decrease, but v increases
Motion of the spring-mass system • At x = 0, F and a are zero, but v is a maximum • The object’s momentum causes it to overshoot the equilibrium position • The force and acceleration start to increase in the opposite direction and velocity decreases • The motion momentarily comes to a stop at x = - A
Motion of the spring-mass system • It then accelerates back toward the equilibrium position • The motion continues indefinitely • The motion of a spring mass system is an example of simple harmonic motion
Simple harmonic motion • Simple harmonic motion – motion that repeats itself and the displacement is a sinusoidal function of time
Amplitude • Amplitude – the magnitude of the maximum displacement (in either direction)
The force law for simple harmonic motion • From the Newton’s Second Law: • For simple harmonic motion, the force is proportional to the displacement • Hooke’s law:
Energy in simple harmonic motion • Potential energy of a spring: • Kinetic energy of a mass:
Chapter 10 Problem 40 A 1.1-kg object is suspended from a vertical spring whose spring constant is 120 N/m. (a) Find the amount by which the spring is stretched from its unstrained length. (b) The object is pulled straight down by an additional distance of 0.20 m and released from rest. Find the speed with which the object passes through its original position on the way up.
Pendulums • Simple pendulum: • Restoring torque: • From the Newton’s Second Law: • For small angles
Pendulums • Simple pendulum: • On the other hand
Pendulums • Simple pendulum:
Pendulums • Physical pendulum:
Chapter 10 Problem 45 The length of a simple pendulum is 0.79 m and the mass of the bob is 0.24 kg. The pendulum is pulled away from its equilibrium position by an angle of 8.508 and released from rest. Assume that friction can be neglected and that the resulting oscillatory motion is simple harmonic motion. (a) What is the angular frequency of the motion? (b) Using the position of the bob at its lowest point as the reference level, determine the total mechanical energy of the pendulum as it swings back and forth. (c) What is the bob’s speed as it passes through the lowest point of the swing?
Simple harmonic motion and uniform circular motion • Simple harmonic motion is the projection of uniform circular motion on the diameter of the circle in which the circular motion occurs
Simple harmonic motion and uniform circular motion • Simple harmonic motion is the projection of uniform circular motion on the diameter of the circle in which the circular motion occurs
Simple harmonic motion and uniform circular motion • Simple harmonic motion is the projection of uniform circular motion on the diameter of the circle in which the circular motion occurs
Simple harmonic motion and uniform circular motion • Simple harmonic motion is the projection of uniform circular motion on the diameter of the circle in which the circular motion occurs
Damping force Damping constant Damped simple harmonic motion
Forced oscillations and resonance • Swinging without outside help – free oscillations • Swinging with outside help – forced oscillations • If ωd is a frequency of a driving force, then forced oscillations can be described by: • Resonance:
Indeterminate structures • Indeterminate systems cannot be solved by a simple application of the equilibrium conditions • In reality, physical objects are not absolutely rigid bodies • Concept of elasticity is employed
Solids • Crystalline solid: atoms have an ordered structure (e.g., diamond, salt) • Amorphous solid: atoms are arranged almost randomly (e.g., glass)
Solids • Have definite volume and shape • Molecules: 1) are held in specific locations by electrical forces 2) vibrate about equilibrium positions 3) can be modeled as springs connecting molecules
Elasticity • All real “rigid” bodies can change their dimensions as a result of pulling, pushing, twisting, or compression • This is due to the behavior of a microscopic structure of the materials they are made of • Atomic lattices can be approximated as sphere/spring repetitive arrangements
Stress and strain • All deformations result from a stress – deforming force per unit area • Deformations are described by a strain – unit deformation • Coefficient of proportionality between stress and strain is called a modulus of elasticity stress = modulus * strain
Thomas Young (1773 – 1829) Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/Li • The modulus for tensile and compressive strength is called the Young’s modulus
Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/Li • The modulus for tensile and compressive strength is called the Young’s modulus
Shearing • For the stress, force vector lies in the plane of the area • Strain is a dimensionless ratio Δx/h • The modulus for this case is called the shear modulus
Hydraulic stress • The stress is fluid pressure P = F/A • Strain is a dimensionless ratio ΔV/V • The modulus is called the bulk modulus
Chapter 10 Problem 66 A square plate is 1.0 102 m thick, measures 3.0 102 m on a side, and has a mass of 7.2 102 kg. The shear modulus of the material is 2.0 1010 N/m2. One of the square faces rests on a flat horizontal surface, and the coefficient of static friction between the plate and the surface is 0.91. A force is applied to the top of the plate. Determine (a) the maximum possible amount of shear stress, (b) the maximum possible amount of shear strain, and (c) the maximum possible amount of shear deformation X that can be created by the applied force just before the plate begins to move.