Download
1 / 3
30 likes | 95 Views
11. 1. 10. 9. 2. 5. 12. 8. 6. 3. 13. 7. 4. Optimal LCP for translations in R 2 C. Ambühl et al. ’00. Link to the paper. Input: A = {a i }, B= {b j }, ε ≥ 0. Define B ij = {v : |a i – (v+b j )| ≤ ε} {B ij } defines an arrangement A({B ij }) of balls of radius ε.

E N D
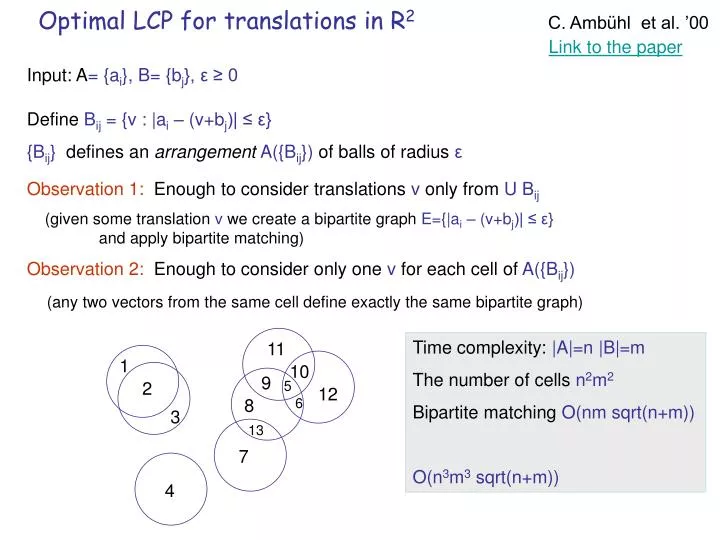
11 1 10 9 2 5 12 8 6 3 13 7 4 Optimal LCP for translations in R2C. Ambühl et al. ’00 Link to the paper Input: A= {ai}, B= {bj}, ε ≥ 0 Define Bij = {v : |ai – (v+bj)| ≤ ε} {Bij} defines an arrangementA({Bij}) of balls of radius ε Observation 1: Enough to consider translations v only from U Bij (given some translation v we create a bipartite graph E={|ai – (v+bj)| ≤ ε} and apply bipartite matching) Observation 2: Enough to consider only one v for each cell of A({Bij}) (any two vectors from the same cell define exactly the same bipartite graph) Time complexity: |A|=n |B|=m The number of cells n2m2 Bipartite matching O(nm sqrt(n+m)) O(n3m3 sqrt(n+m))
Optimal LCP for rotations in R2S.Chakraborty et al. ’99 Link to the paper Rotations around the point p. Dome Dij is the circular figure traced out by the point p’ on the surface of Sp by rotations which cause ai to lie within the ε-ball around bj. A({Dij}) defines an arrangement of circular segments on Sp Observation: Enough to consider only one rotation for each cell (segment) of A({Dij}) Time complexity: |A|=n |B|=m The number of domes nm -> nm intersections on the circle (there are 2nm segment end points) Bipartite matching O(nm sqrt(n+m)) O(n2m2 sqrt(n+m))
Optimal LCP for rotations+translations in R2C. Ambühl et al. ’00 There are two cases: I II Link to the paper Input: A= {ai}, B= {bj}, ε ≥ 0 Bij = {v : |ai – (v+bj)| ≤ ε} Bij becomes a function of rotation angle r. Arrangement A({Bij}) becomes a function of r as well. Observation: The number of combinatorial changes of the arrangement A({Bij}) is (nm)3 -> there are (nm)2 +(nm)3 relevant points on the interval [0,2π) Time complexity: |A|=n |B|=m O(n4m4 sqrt(n+m))