Download
1 / 1
30 likes | 257 Views
Multi-VTOL Cooperative TIR Power line Inspection. Abstract

E N D
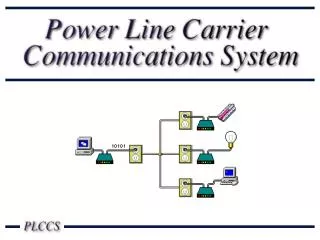
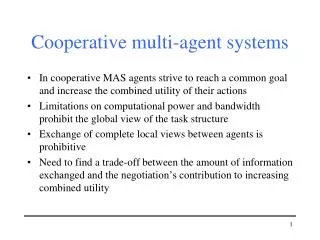
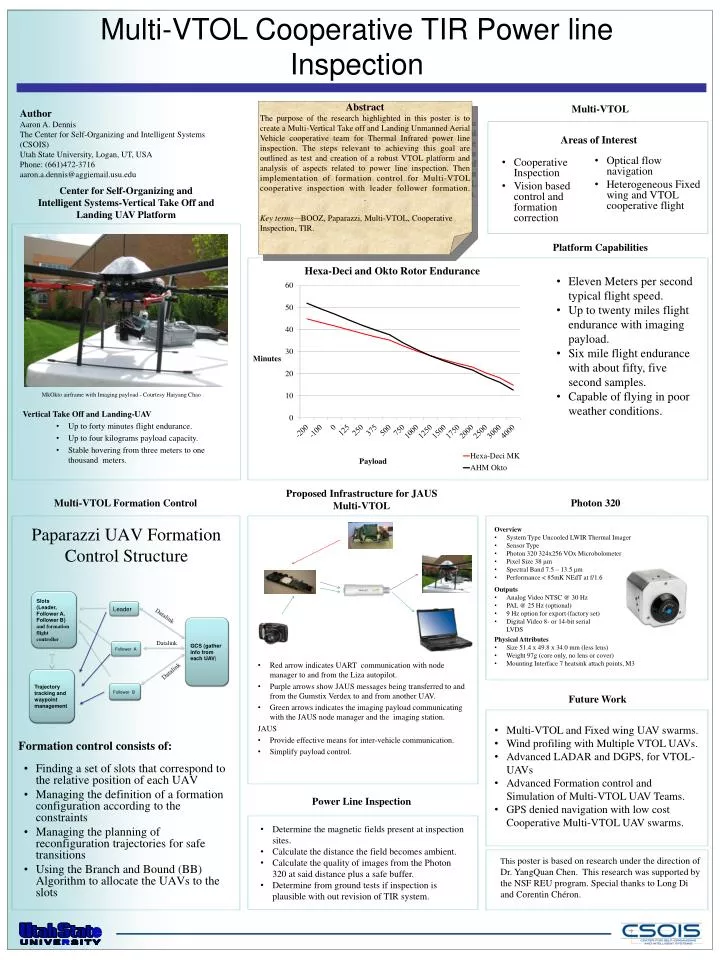
Multi-VTOL Cooperative TIR Power line Inspection Abstract The purpose of the research highlighted in this poster is to create a Multi-Vertical Take off and Landing Unmanned Aerial Vehicle cooperative team for Thermal Infrared power line inspection. The steps relevant to achieving this goal are outlined as test and creation of a robust VTOL platform and analysis of aspects related to power line inspection. Then implementation of formation control for Multi-VTOL cooperative inspection with leader follower formation. . Key terms—BOOZ, Paparazzi, Multi-VTOL, Cooperative Inspection, TIR. Multi-VTOL Author Aaron A. Dennis The Center for Self-Organizing and Intelligent Systems (CSOIS) Utah State University, Logan, UT, USA Phone: (661)472-3716 aaron.a.dennis@aggiemail.usu.edu Areas of Interest • Optical flow navigation • Heterogeneous Fixed wing and VTOL cooperative flight • Cooperative Inspection • Vision based control and formation correction Center for Self-Organizing and Intelligent Systems-Vertical Take Off and Landing UAV Platform Platform Capabilities • Eleven Meters per second typical flight speed. • Up to twenty miles flight endurance with imaging payload. • Six mile flight endurance with about fifty, five second samples. • Capable of flying in poor weather conditions. MkOkto airframe with Imaging payload - Courtesy Haiyang Chao . • Vertical Take Off and Landing-UAV • Up to forty minutes flight endurance. • Up to four kilograms payload capacity. • Stable hovering from three meters to one thousand meters. Proposed Infrastructure for JAUS Multi-VTOL Multi-VTOL Formation Control Photon 320 Paparazzi UAV Formation Control Structure • Overview • System Type Uncooled LWIR Thermal Imager • Sensor Type • Photon 320 324x256 VOxMicrobolometer • Pixel Size 38 μm • Spectral Band 7.5 – 13.5 μm • Performance < 85mK NEdT at f/1.6 • Outputs • Analog Video NTSC @ 30 Hz • PAL @ 25 Hz (optional) • 9 Hz option for export (factory set) • Digital Video 8- or 14-bit serial LVDS Slots (Leader, Follower A, Follower B)and formation flight controller Leader Datalink GCS (gather info from each UAV) • Physical Attributes • Size 51.4 x 49.8 x 34.0 mm (less lens) • Weight 97g (core only, no lens or cover) • Mounting Interface 7 heatsink attach points, M3 Datalink Follower A • Red arrow indicates UART communication with node manager to and from the Liza autopilot. • Purple arrows show JAUS messages being transferred to and from the GumstixVerdex to and from another UAV. • Green arrows indicates the imaging payload communicating with the JAUS node manager and the imaging station. • JAUS • Provide effective means for inter-vehicle communication. • Simplify payload control. Datalink Trajectory tracking and waypoint management Follower B Future Work • Multi-VTOL and Fixed wing UAV swarms. • Wind profiling with Multiple VTOL UAVs. • Advanced LADAR and DGPS, for VTOL-UAVs • Advanced Formation control and Simulation of Multi-VTOL UAV Teams. • GPS denied navigation with low cost Cooperative Multi-VTOL UAV swarms. Formation control consists of: • Finding a set of slots that correspond to the relative position of each UAV • Managing the definition of a formation configuration according to the constraints • Managing the planning of reconfiguration trajectories for safe transitions • Using the Branch and Bound (BB) Algorithm to allocate the UAVs to the slots Power Line Inspection • Determine the magnetic fields present at inspection sites. • Calculate the distance the field becomes ambient. • Calculate the quality of images from the Photon 320 at said distance plus a safe buffer. • Determine from ground tests if inspection is plausible with out revision of TIR system. • This poster is based on research under the direction of Dr. YangQuan Chen. This research was supported by the NSF REU program. Special thanks to Long Di and CorentinChéron.