Download
1 / 10
100 likes | 210 Views
The Cyber-Physical Bike: A Step Towards Safer Green Transportation. S. Smaldone C. Tonde V. K . Ananthanarayanan A. Elgammal L. Iftode Summarized by Yuki. Outline. Analysis Design Implementation Evaluation Conclusion. Analysis. Problem

E N D
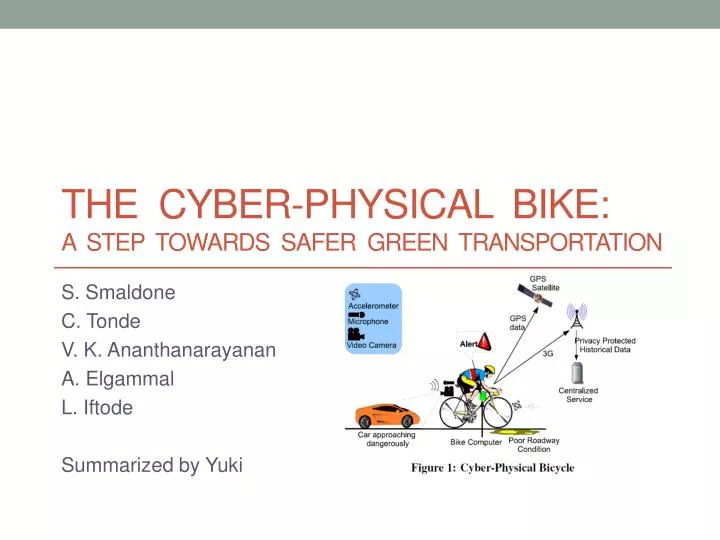
The Cyber-Physical Bike:A Step Towards Safer Green Transportation S. Smaldone C. Tonde V. K. Ananthanarayanan A. Elgammal L. Iftode Summarized by Yuki
Outline • Analysis • Design • Implementation • Evaluation • Conclusion
Analysis • Problem • A biker must spend cognitive and physical ability to periodically scan for a rear-approaching vehicle. As a result, the biker can not maintain continual awareness for the forward situation. • Solution • The Cyber-Physical bicycle system continuously monitors the environment behind the biker, automatically detects rear-approaching vehicles, and alerts the biker prior to the approach.
Design • Roadway segmentation analysis using optical flow • Reduces computational load
Design • Vehicle tracking • Determines if each vehicle passes the biker in either a safe or unsafe manner
Implementation • Development environment • C/C++ • NVIDIA CUDA library (v2.3) • Open source optical flow library[1] • Bike computer - HP Mini 311 notebook • Intel Atom N280 1.67 GHz CPU • 3 GB RAM • NVIDIA ION GPU (16 CUDA cores and 256 MB memory) • 80 GB SSD hard disk • 3.26 pounds / 1.48 kilograms (the worst case with peripherals) 1. WERLBERGER, M., TROBIN, W., POCK, T., WEDEL, A., CREMERS, D., AND BISCHOF, H. Anisotropic Huber-L1 optical flow. In BMVC’09 (London, UK, 2009).
Implementation (cont.) • Rear-facing video camera - Sony DCR-SX40 • Over 3 hours of video recordings of real-world roadway cycling traces (repeatability of experiment) • Every interaction between the biker and a vehicle (approaching and departing) are manually annotated using the timestamps • Ordinary road bicycle - Trek FX7.5
Evaluation • How accurate are video-based techniques in detecting rear-approaching vehicles? Accuracy = TP / (TP + FP + FN) = 19 / (19 + 6 + 1) = 73.1% A vehicle hidden by another biker A sudden vibration caused by uneven roadway
Evaluation (cont.) • Can detection be performed timely? • Alerting to occur an average of 3.5 seconds prior to a vehicle encounter at reduced frame rates (3 FPS) • 3.5 seconds is 92% of the potential time (the difference between the first appearance of the vehicle and the time it passes the cyclist)
Conclusion • The Cyber-Physical bicycle is a system that augments normal bicycles with video processing capabilities for automated rear-approaching vehicle detection. • This system directly improves the safety of bikers by reducing their cognitive overheads of continuously probing for rear-approaching vehicles. • The prototype can perform rear-vehicle detection with good accuracy at full frame rates (30 FPS), and can operate in real-time at reduced frame rates (3 FPS).