Download
1 / 21
210 likes | 368 Views
Analogno vs. digitalno ?. 1. Analogno vs. digitalno ?. 2. Analogno vs. digitalno ?. 3. Analogno vs. digitalno ?. 4. IZBOR MODELA.

E N D
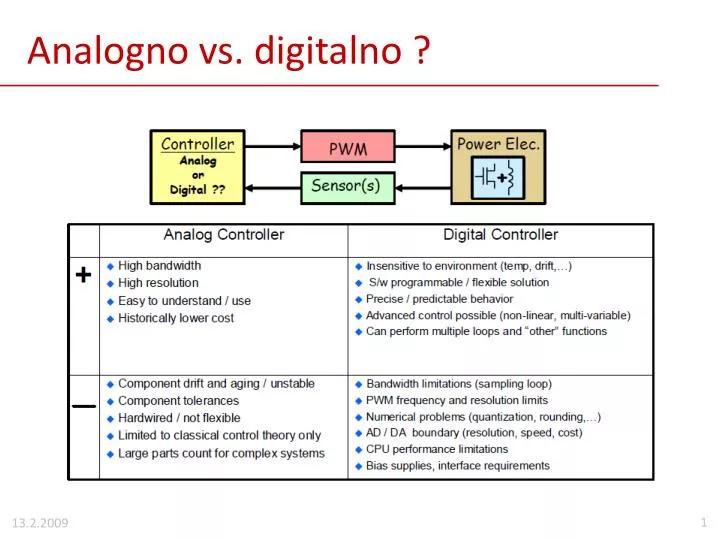
IZBOR MODELA Uporaba odgovarajućeg modela ili niza modela središnja je odluka u procesuprojektiranja upravljanja. U različitim fazama ili na različitim razinama projektiranjamogu biti potrebni različiti modeli. Čak i u određenoj fazi projektiranja vjerojatnoima nekoliko mogućih modela koji se razlikuju po jasnoći, složenosti, točnosti,području definicije, prilagodljivosti, raspravljivosti itd. Očito, u izbor modela upletenoje nekoliko tehničkih i komercijalnih kompromisa. Primjerice, model koji dobro simulira ponašanje učinskog sklopa bez povratneveze ne mora biti dobro polazište za projektiranje upravljačkog sklopa sustava spovratnom vezom. Složenijim modelom učinskog sklopa može se objasniti opaženo ponašanje sustava bez povratne veze, ali složeniji model može biti analitički neprikladniji,nekorisniji za stvaranje idejnih rješenja upravljačkog sklopa i možda neplodonosnijiza dobivanje upravljačkih sklopova koji poništavaju promjene u sustavu. Sdruge strane, jednostavnijim modelom mogu se izgubiti ključne značajke ponašanjasustava, što može dovesti do nezadovoljavajućih upravljačkih sklopova. 5
IZBOR MODELA U praksi treba raditi s više modela, ispitujući predviđanja dobivena na jednommodelu s onima dobivenim na drugom i uspoređujući ih s eksperimentalnimopažanjima. Spoznaje dobivene takvim postupkom uporabljuju se za iterativno usavršavanjemodela i konačno za izradu projekta sustava upravljanja. Zato se trebate upoznatis različitim pristupima modeliranju sklopova učinske elektronike i pripadajućih upravljačkih sklopova! Raspravu o pristupima modeliranju započet ćemo izgradnjomusrednjenih modela. Usrednjeni modeli dobro opisuju usrednjeno ponašanje nekih porodica učinskih sklopova. Također ćemose baviti modelimau prostoru stanja. Modeli u prostoru stanja pružaju daleko više od usrednjenih modela. 12
IZBOR MODELA Ovdje treba naglasiti da za razvoj upravljačkih sklopova učinskih sklopova trebanapustiti statičke modele učinskih sklopova, tj. modele koji opisuju ustaljeno stanje. Klasični simulatori električkih sklopova (pa i sklopova učinske elektronike) kao što su SIMPLORER, PSPICE, EWB, SABER i slični mogi simulirati i statičko i dinamičko ponašanje sklopova. Koristili smo ih do sada za istraživanje statičkog ponašanja sklopova. Kao što ćemo vidjeti tijekom predavanja, simulacija dinamičkog ponašanja sklopova učinske elektronike korištenjem tzv. trenutačnih modela dugotrajna je i ne može dati općenite odgovore na pitanja o dinamičkim svojstvima sklopova. No ipak se klasični simulatori mogu iskoristiti za istraživanje dinamičkog ponašanja, ukoliko se primjeni drugačiji modeli, no to nije uvijek izravan postupak. 13
IZBOR MODELA – PRIMJER SIMPLORER U SIMPLORER-u se sklop učinske elektronike može simulirati pomuću trenutačnog modela (lijeva slika), a moguće je ostvariti i simulacijski model usrednjenog sklopa (desna slika). Pri modeliranju drugih oblika simulacijskih modela osim trenutačnih, potrebno je koristiti dodatne elemente iz standardnih ili dodatnih biblioteka, a koji puta je potrebno razviti i vlastite elemente. 14
IZBOR MODELA – TRENUTAČNI MODELI Trenutačni modeli mogu prilično vjerno opisati statičko i dinamičko ponašanje sklopova, čak se mogu ugraditi i regulatori. Točnost rezultata dobivenih trenutačnim modelima ovisi o točnosti opisa stvarnog sustava pomoću modela, a poglavito ovisi o primjenjenim algoritmima numeričke integracije, te o koraku integracije. Ispravan odabir koraka integracije (engl. Integration step) izuzetno je važan, jer određuje brzinu i točnost simulacije. Približno iskustveno pravilo je da minimalan korak integracije mora biti barem za red veličine manji od najmanje vremenske kostante u modeliranom sklopu ! (Pokušajte sami to ispitati na proizvoljnom primjeru u SIMPLORER-u) Ponovimo da trenutačni modeli ne modu dati općenite odgovore o dinamičkom ponašanju sklopova, stabilnosti i robustnosti sustava i sl. Oni mogu dati dovoljno točne odgovore o ponašanju sklopa u određenoj konkretnoj situaciji, te mogu poslužiti kao referentni modeli, umjesto mjerenja. 15
NUŽNOST DINAMIČKIH MODELA Jednostavno prosuđivanje u primjeru 2 može dovesti barem do proporcionalnogdijela PI-regulatora. Uz izvjesno ugađanje, proporcionalni regulator sam može osigurati stabilan rad u velikom području radnih točaka (premda, vjerojatno,s neprihvatljivo velikom pogreškom u ustaljenom stanju). U tom pogledu, elektromotornipogon s usmjerivačem benigni je sustav jer se prihvatljivi regulator možeizvesti iz modela koji nije mnogo sofisticiraniji od onoga u primjeru 2. Međutim, može se upasti u nevolje ako se radi po zdravom razumu ili ako seupotrebljavaju pretjerano jednostavni modeli pri projektiranju upravljačkih sklopovas povratnom vezom. Primjerice, upravljački sklop zasnovan isključivo na razumijevanjustatičkih radnih karakteristika, ignoriranjem dinamičkih pojava, može završiti strašnim neuspjehom. 16
PRIMJER 3. Zahtjev za boljim dinamičkim karakteristikama uzlazno-silaznog pretvarača uprimjeru 1 od onih koje se mogu dobiti upravljanjem s unaprijednom vezom, alibez povratne veze, vodi na razmatranje rješenja s povratnom vezom. Sada je potrebnoizmjeriti odstupanje srednje vrijednosti izlaznog napona od željene vrijednostiVref=–9 V te na osnovi tog nesklada promijeniti faktor vođenja od nazivne vrijednostiD na D+d∼. Korekcija d∼ovisi o polaritetu i o veličini odstupanja napona. Ispitivanje (invertirajuće) statičke karakteristike pretvarača VoAV=–vinD/D′navodi na sljedeći zakon upravljanja: ako je pogreška vo ∼ = VoAV–Vref negativna,pokazujući da je VoAV previše negativan, treba smanjiti faktor vođenja. Slično, ako jepogreška pozitivna, treba povećavati faktor vođenja. Na taj prirodni zakon modulaciješirine impulsa (PWM) navodi statička karakteristika. 17
PRIMJER 3. • Blokovski dijagram sustava upravljanja uzlazno-silaznim pretvaračem s proporcionalnom povratnom i unaprijednom vezom. • Ponašanjeodziva idealnog kruga na skokovit pad napona napajanja u ovisnosti o porastu negativnog pojačanja. • Ponašanje odziva idealnog krugana skokovit pad napona napajanja u ovisnosti o porastu pozitivnog pojačanja 18
PRIMJER 3. Jedno je ostvarenje opisanog zakona upravljanja sustav upravljanja s proporcionalnompovratnom vezom, prikazan blokovskim dijagramom na slici a).Naziv potječe odatle što su zahtijevane promjene faktora vođenja proporcionalneizmjerenom odstupanju srednje vrijednosti izlaznog napona VoAV. Konstantapojačanja h mora biti negativna da bi se dobilo korekcijsko djelovanje u skladu sastatičkom karakteristikom. Taj blokovski dijagram još pokazuje da se povratna vezamože uporabiti zajedno s prethodno spomenutom unaprijednom vezom. Slika b) prikazuje odziv idealnog sklopa s novouvedenom povratnomvezom i zadržanom prethodno uvedenom unaprijednom vezom na jednaki skokovitipad ulaznog napona kao u primjeru 1. Vidi se kako djeluje povećavanje proporcionalnoganegativnog pojačanja h. Očito je da povećavanje negativnog pojačanjah dovodi do oscilatornijeg odziva i da sustav postaje nestabilan prije nego što hpostane jako negativan. Suprotni intuitivni izbor pozitivnog pojačanja h ne dovodi odmah do katastrofe kakva se može očekivati na osnovi statičke karakteristike. Valni oblici na slici c) pokazuju da odziv može biti stabilan i u području pozitivnih vrijednosti h. Očito, naše razumijevanje sustava zasnovano na statičkoj karakteristicivodi nas pogrešnim putom. 19
PRIMJER 3. Valni oblici prikazani u primjeru 3 dobiveni su računanjem srednje vrijednostivremenski ovisnih sklopnih valnih oblika u intervalu jednakom sklopnoj periodipretvarača (o formalnoj definiciji kasnije, ovo je mogući zadatak za domaću zadaću). Tako izračunana srednja vrijednost odnosi se na jedantrenutak i mijenja se od trenutka do trenutka te se zato naziva trenutačna srednjavrijednost. Dobiveni valni oblik trenutačne srednje vrijednosti, tzv. usrednjeni valnioblik, sporo se mijenja od periode do periode. Tako je iz vremenski ovisnog sklopnogavalnog oblika uklonjena sklopna valovitost. Dva su razloga zašto se uvode usrednjeni valni oblici. Prvi je razlog: uzlazno-silaznim pretvaračem regulira se srednja vrijednost izlaznog napona, a ne trenutačna vrijednost; tj. detalji u svezi valovitosti nisu toliko zanimljivi ako je valovitost dovoljnomala. Drugi je razlog: usrednjeni se valni oblici za tu vrstu strujnih krugova lakše izračunavaju ili simuliraju nego trenutačni valni oblici ako se uporabe usrednjenimodeli. 20
NUŽNOST DINAMIČKIH MODELA Primjer 3. pokazuje da statički model nije katkad dostatan za projektiranje upravljačkog sklopa s povratnom vezom. Zbog toga se moraju potražiti modeli kojiutjelovljuju i dinamičke pojave. Jasnija slika pojava koje se događaju u uzlazno-silaznom pretvaraču prikazanom na slici dobit će se nakon izgradnje njegovadinamičkogmodela za analiziranje odziva izlaznog napona na promjene faktoravođenja. 21