Download
1 / 66
670 likes | 880 Views
3. CONTROL DE TRÁFICO Y CONTROL DE CONGESTIÓN. 3.1 Introducción 3.2 Control de tráfico 3.2.1 Gestión de recursos usando VPs 3.2.2 Control de Admisión de Conexiones (CAC) 3.2.3 Evaluación de la banda requerida 3.2.4 Gestión rápida de recursos

E N D
3. CONTROL DE TRÁFICO Y CONTROL DE CONGESTIÓN 3.1 Introducción 3.2 Control de tráfico 3.2.1 Gestión de recursos usando VPs 3.2.2 Control de Admisión de Conexiones (CAC) 3.2.3 Evaluación de la banda requerida 3.2.4 Gestión rápida de recursos 3.2.5 Control de parámetros de uso (UPC) 3.2.6 Control de prioridad 3.2.7 Modelar el tráfico 3.3 Control de congestión 3.3.1 Descarte selectivo de celdas 3.3.2 Indicación de congestión explícita hacia adelante 3.3.3 Control de tráfico ABR
3.1 INTRODUCCION: DEFINICIONES • Congestión • Es definida como la condición que existe cuando la red no es capaz de satisfacer alguno de los objetivos de funcionamiento que han sido declarados y negociados • Las definiciones clásicas de congestión incluyen uno o varios de los siguientes aspectos: retardo, pérdida de paquetes (celdas en nuestro caso) y caída del flujo efectivo. • El problema es determinar el punto exacto a partir del cual podemos decir que la red está en congestión
3.1 INTRODUCCION: DEFINICIONES (2) • Control de congestión • esta relacionado con las operaciones realizadas por la red cuando ocurre la congestión, con el objetivo de minimizar la intensidad, la extensión y la duración de la congestión • la congestión puede ser causada por fluctuaciones estadísticamente impredecibles del flujo de tráfico o por un fallo en la red
3.1 INTRODUCCION: DEFINICIONES (3) • Control de tráfico • define el conjunto de acciones realizadas por la red para evitar la congestión • se basa esencialmente en la determinación de si se puede establecer una nueva conexión teniendo en cuenta los parámetros acordados entre el subscriptor y la red • se realiza una reserva de recursos suficientes para que los niveles de rendimiento pactados se puedan mantener • la red acepta tolerar un cierto nivel de tráfico de la conexión y el subscriptor acepta no exceder los límites acordados
3.1 INTRODUCCION: OBJETIVOS • Objetivos del control de tráfico y del control de congestión • proteger a la red y al mismo tiempo proporcionar al usuario los objetivos del contrato tráfico del servicio que ha declarado • son especificados en el documento I.371: • El diseño de un conjunto óptimo de controles de tráfico y de congestión en la capa ATM debe minimizar la complejidad de la red y del sistema final, al tiempo que maximiza la utilización de la red
3.1 INTRODUCCION : OBJETIVOS (2) • El control de tráfico y de congestión en la capa ATM debería permitir un número suficiente de clases de calidad de servicio (QoS) de la capa ATM para todos los servicios de red posibles; la especificación de estas clases de QoS debe ser consistente con las prestaciones de la red en estudio • El control de tráfico y de congestión en la capa ATM no debe depender de protocolos AAL, específicos del servicio de red, ni de protocolos de capa superior que sean específicos de la capa de aplicación. Los protocolos de la capa inmediatamente superior a la capa ATM pueden hacer uso de información que puede ser ofrecida por la capa ATM para mejorar la utilidad de aquellos protocolos que pueden derivarse de la red
3.1 INTRODUCCION: TIEMPO DE RESPUESTA • Se consideran cuatro niveles de temporización: • Tiempo de inserción de celda: las funciones de este nivel reaccionan inmediatamente ante celdas transmitidas • Tiempo de propagación de ida y vuelta: en este nivel la red responde en el tiempo de vida una celda en la red, y puede ofrecer indicaciones de realimentación al origen • Durante la conexión: en este nivel la red determina si puede establecerse una nueva conexión con una QoS dada y qué nivel de prestaciones se fijará • Término de larga duración: son controles que afectan a más de una conexión ATM y son establecidos para uso de larga duración
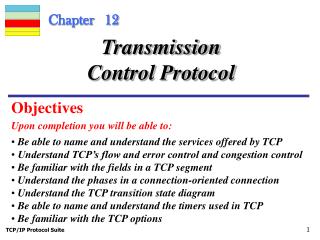
Tiempo de respuesta Funciones de control de tráfico Funciones de control de congestión Término de larga duración • Gestión de recursos de red usando VPs Duración de conexión • Control de admisión de conexión (CAC) Tiempo de propagación de ida y vuelta • Gestión rápida de recursos • Notificación explícita (EFCI) • Control de tráfico ABR Tiempo de inserción de celda • Control de parámetros de uso (UPC) • Control de prioridad • Modelado del tráfico • Rechazo selectivo de celdas • Descarte de tramas 3.1 INTRODUCCION: CLASIFICACION • Las diferentes funciones se han clasificado teniendo en cuenta el intervalo de tiempo en el que operan
3.2 CONTROL DE TRÁFICO 3.2.1 Gestión de recursos usando VPs 3.2.2 Control de Admisión de Conexiones (CAC) 3.2.3 Evaluación de la banda requerida 3.2.4 Gestión rápida de recursos 3.2.5 Control de parámetros de uso (UPC) 3.2.6 Control de prioridad 3.2.7 Modelar el tráfico
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs • Concepto fundamental • Gracias a la utilización de los VPs, se realiza una reserva de recursos de manera que se separan los flujos de tráfico simplificandose las funciones de gestión. Es preferible agrupar las conexiones que tengan unas características de tráfico y unos requerimientos de QoS parecidos • Un VP puede ser visto como un enlace lógico directo entre dos nodos (el nodo fuente y el nodo destino) y puede consistir en dos o mas enlaces físicos que juntos forman un camino • Un VP estará definido por los nodos términales, la ruta actual entre los nodos términales y la capacidad del VP • La capacidad asignada a un VP puede ser cambiada cuando, por ejemplo, se necesita más capacidad • La QoS ofrecida por el VP depende de los recursos (capacidad) que tenga asignados y de las características de las conexiones que contenga
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (2) • Ventajas de la utilización de VPs • Se reduce la carga de los mecanismos de control porque las funciones necesarias para establecer un camino entre dos nodos solo se realizan una vez (al establecer el VP) en lugar de hacerlo para cada una de las conexiones que usen ese camino • Como el VP tiene una capacidad asignada el control de admisión de conexiones (CAC) sólo se realiza en el nodo de inicio del VP • Cuando se establece una conexión el proceso de establecimiento no debe realizarse en los nodos intermedios, por lo que se reduce el retardo de establecimiento de conexión. • En los nodos intermedios no se realizan funciones de encaminamiento
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (3) • Desventajas de la utilización de VPs • Aunque el tener una capacidad asignada al VP, implica el poder hacer el establecimiento de una conexión de forma rápida y simple, tiene el inconveniente de que esta reserva a priori de los recursos para cada uno de los VPs reduce la utilización de la capacidad del enlace físico y la ganancia por multiplexación estadística • Si sobre un mismo enlace físico tenemos definidos diversos VPs con una capacidad asignada, puede darse el caso que mientras un VP no pueda aceptar más conexiones algún otro VP no este utilizando la totalidad de la banda que tiene asignada • Diferentes mecanismos de asignación de banda a los VPs se han definido para contrarrestar este inconveniente • Además, la multiplexación estadística sólo se realiza entre la porción de banda asignada al VP.
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (4) • Mecanismos de asignación de banda a los VPs • Banda dedicada:Mientras el VP existe la banda asignada es fija y constante. Hay una baja utilización del enlace. La banda de cada VP no puede ser compartido con otros VPs • Variable en el tiempo:Se asigna una banda fija dependiendo del periodo de tiempo (hora, día, semana ...) • Compartición completa:La banda no utilizada del enlace es totalmente compartida por todos los VPs. Tiene la ventaja de que se realiza una utilización óptima pero con el inconveniente de que la banda de cada VP cambia cada vez que se establece o se elimina una conexión y por lo tanto se genera mucho tráfico de control
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (5) • Asignación dinámica:La banda cambia a lo largo del tiempo para adaptarse a las variaciones de tráfico y para obtener una mejor utilización de los recursosEs importante alcanzar un compromiso entre la utilización de los recursos y la carga de procesamiento requerida por el sistema de señalizaciónUn factor importante es determinar en cuanto se debe incrementar la banda del VP. Si el tamaño es grande no se aprovechan los recursos. Si es pequeño, es fácil que al poco tiempo se tenga que incrementar otra vez, con el consiguiente aumento del tráfico de control
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (6) • Red de caminos virtuales (VPN) • la VPN está definida por un conjunto de nodos y por el conjunto de VPs que conectan estos nodos • los VPs incrementan la conectividad de los nodos • la VPN está incrustada dentro de la red física y forma un nivel superior, que es lógicamente independiente de la red física • sobre un enlace físico pueden haber varios VPs • pueden coexistir diferentes VPNs sobre una red física
3.2.1 GESTION DE RECURSOS DE RED USANDO VPs (7) • Diseño de la VPN • Clustering: determinar el conjunto de nodos terminales de los VPs • Establecimiento de los VPs: determinar la ruta para conectar los nodos seleccionados • Asignación de banda a los VPs: determinar la capacidad de banda óptima que debe ser reservada a cada VP
3.2.2 CONTROL DE ADMISIÓN DE CONEXIONES (CAC) • Durante la fase de establecimiento de la conexión se realizan un conjunto de acciones para determinar si la conexión será aceptada o rechazada. • Es la primera línea de defensa de autoprotección de la red ante una carga excesiva • La red sólo acepta la conexión si tiene los recursos necesarios para admitir el nuevo tráfico manteniendo la QoS convenida para las conexiones ya existentes (incluyendo la nueva conexión) • La decisión se toma en función de los parámetros declarados por la conexión, de los requerimientos de calidad de servicio y del estado de la red • La red seguirá ofreciendo la QoS convenida mientras el tráfico del usuario cumpla los parámetros declarados
3.2.2 CONTROL DE ADMISIÓN DE CONEXIONES (CAC) (2) • Se debe establecer un contrato de tráfico entre el usuario y la red. Los parámetros son negociados mediante un protocolo de señalización:1) el usuario envía un mensaje a la red especificando la categoría de servicio (CBR, rt-VBR, nrt-VBR, ABR, UBR ...), los descriptores de tráfico (PCR, SCR, MBS, MCR) y los parámetros de QoS demandados2) el CAC decide si puede aceptar o no la conexión e informa al usuario mediante un nuevo mensaje de señalización. • Si la respuesta es afirmativa se envían las condiciones previstas de calidad • Si la respuesta es negativa se puede renegociar el establecimiento de la conexión, rebajando las velocidades de servicio o rebajando la calidad de servicio solicitada inicialmente
CONTRATO DE TRÁFICO Mensaje de señalización Petición de nueva conexión (categoría de servicio, descriptores de tráfico, requerimientos de QoS) Usuario CAC Mensaje de señalización Respuesta Si (QoS estimada) No ( ¿Quieres renegociar¿) RED La poca exactitud de los descriptores de tráfico puede comprometer la efectividad del CAC 3.2.2 CONTROL DE ADMISIÓN DE CONEXIONES (CAC) (3)
3.2.3 EVALUACION DE LA BANDA REQUERIDA • Para que el CAC sea efectivo es importante determinar la bandanecesaria en el VP para acomodar la nueva conexión • El problema es complejo debido a la multiplexación estadística que se da para el tráfico VBR • Podemos decir que la banda ocupada por un conjunto de llamadas en presencia de multiplexación estadística se encuentra entre la suma de velocidades media y la suma de las velocidades de pico de todas las conexiones • Como se puede suponer, si el tráfico es muy variable (con un alto grado de ráfaga) la diferencia entre estos dos valores puede ser grande
Suma de velocidades de pico CapacidadEquivalente Aumento del tamaño del buffer Suma de velocidades medias Número de canales multiplexados 3.2.3 EVALUACION DE LA BANDA REQUERIDA (2) • En la siguiente figura podemos observar algunos detalles interesantes: • al aumentar el número de conexiones la banda necesaria se acerca a la media, lo que significa una disminución de la banda por conexión • el aumento del tamaño del buffer también provoca una disminución de la banda por conexión • si aumentamos indefinidamente el buffer podríamos llegar a igualar la banda necesaria a la media, pero el aumento del buffer implica un aumento del retardo hasta niveles inadecuados para tráfico interactivo
3.2.3 EVALUACION DE LA BANDA REQUERIDA (3) • Existen diversos método para calcular la banda necesaria para aplicar el CAC: • Flujo de fluidos: se asume que el flujo de celdas es continuo, en lugar de discreto como es en la realidad Se aplican las técnicas de cálculo utilizadas en el análisis del flujo de fluidosEstos métodos resultan satisfactorios en sistemas con buffers tamaño de grande
Probabilidad Convolución Gaussiana Área de Congestión Lineal Capacidad del enlace Velocidad instantánea 3.2.3 EVALUACION DE LA BANDA REQUERIDA (4) • Métodos de análisis estacionario: En estos métodos el factor dominante es la multiplexación estadística y son adecuados para buffers pequeñosSe basan en calcular la distribución probabilística de velocidades, es decir, en conocer la probabilidad de que el conjunto de fuentes esté emitiendo a una velocidad dadaA partir de la función de distribución se evalúa la prob. de congestión y a partir de ésta la prob. de pérdida de celdas
3.2.3 EVALUACION DE LA BANDA REQUERIDA (5) Existen diversas aproximaciones: la convolución, la gausiana y la lineal • El método analítico de la convolución es el más exacto pero requiere un gran esfuerzo de cálculo • En la zona de velocidades altas, que es donde ocurre la congestión, la gaussiana aproxima la distribución probabilistica de velocidades. La gaussiana también se llama de los dos momentos, porque se evalúa conociendo la media y la desviación típica de cada una de las fuentes • Finalmente, la aproximación lineal aproxima la parte final de la distribución a una recta y es suficientemente exacta en entornos homogéneos
3.2.3 EVALUACION DE LA BANDA REQUERIDA (6) • Banda equivalente: la idea consiste en asignar un valor único a la banda requerida por una fuente.Definiremos la capacidad equivalente como la cantidad mínima de banda que debe estar disponible en el VP para que la nueva conexión pueda ser aceptada sin penalizar las conexiones existentes en el VPLa capacidad equivalente no es un valor constante, además de las características de la conexión también depende del número de conexiones que haya y del tamaño del buffer asignadoAunque se pueden utilizar métodos exactos para realizar el cálculo, el mayor inconveniente que presenta es que este cálculo se aplica a grupos de conexiones homogéneas y que cuando el tráfico es heterogéneo se suman estos valores y la exactitud decae
3.2.3 EVALUACION DE LA BANDA REQUERIDA (7) • Métodos heurísticos: se basan en hacer predicciones del futuro comportamiento de la red basándose en el estado actual, pero también se utilizan mediciones reales del tráfico existente. De la diferencia entre las predicciones y las mediciones reales, el sistema ajusta sus cálculosEn esta dirección, los trabajos realizados siguen estrategias muy diferentes, desde la utilización de la lógica difusa (fuzzy logic), pasando por redes neuronales, o sistemas de inteligencia artificial entre otros
3.2.4 GESTION RÁPIDA DE RECURSOS • Estas funciones operan en la escala temporal del retardo de propagación de una conexión ATM • Una posible función puede ser permitir que la red asigne a una conexión individual de tipo ráfaga la capacidad necesaria (en términos de velocidad o de tamaño de buffer) en todos los VPs que utilice para que la ráfaga de celdas pueda ser transmitida correctamente • Para hacer esta reserva es necesario implementar un protocolo de señalización • Este mecanismo es mas apropiado cuando el retardo es tolerable (ya que se debe realizar la señalización y la reserva de banda) pero no lo es la pérdida de celdas (si enviáramos la ráfaga sin saber si se puede reservar capacidad podría producirse pérdida de celdas en los buffers)
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) • Suponemos que se han definido descriptores de tráfico adecuados y que las decisiones de admisión conexión se basan en la disponibilidad de la banda adecuada en el VP para acomodar la capacidad solicitada por la conexión. • ¿ Cómo podemos prevenir al resto de usuarios de un VP si una conexión admitida no cumple (a propósito, involuntariamente o maliciosamente) los descriptores de tráfico declarados y emite un tráfico por encima del contratado ? • Es necesario el control de parámetros de uso para asegurarnos de que las conexiones cumplen los pactos realizados durante el establecimiento de la conexión • El incumplimiento del contrato de tráfico tiene como consecuencia inmediata la degeneración de la calidad de servicio, no sólo de este usuario, sino de todos los que comparten los mismos recursos
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) (2) • Definición • La UPC es el conjunto de acciones realizadas para monitorizar y controlar el tráfico en términos de tráfico ofrecido por la conexión, para determinar si está en concordancia con el contrato de tráfico • El objetivo principal es proteger los recursos de la red de conductas que puedan afectar la calidad de servicio de las otras conexiones ya establecidas • Esta protección se realiza detectando el incumplimiento de los parámetros negociados y realizando las acciones oportunas
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) (3) • Acciones que puede realizar: • Dependiendo del tráfico transportado por la red y de los parámetros declarados por los usuarios, la red puede: • Discard: descartar las celdas recibidas por encima del máximo permitido, es decir, descartar aquellas celdas que no cumplan los parámetros negociados • Tagging: marcar las celdas excedentes con el bit CLP para decir a la red que esta celda es de baja prioridad, que debe ser transferida mientras no cause daños serios a la red y que puede ser descartada si es necesario
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) (4) • Si el usuario ha negociado dos niveles de prioridad de celdas la situación es más compleja: • Una celda con CLP=0 que cumple el contrato de tráfico para (CLP=0) es aceptada • Una celda con CLP=0 que no cumple con el contrato para (CLP=0) pero lo cumple para (CLP=0+1) es marcada, es decir se pone CLP=1, y es aceptada • Una celda con CLP=0 que no cumple con el contrato para (CLP=0) ni para (CLP=0+1) es rechazada • Una celda con CLP=1 que cumple el contrato de tráfico para CLP=1 es aceptada • Una celda con CLP=1 que no cumple con el contrato para (CLP=1) es rechazada
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) (5) • Realización de la UPC • El control de los parámetros de uso puede realizarse tanto a nivel de camino virtual (VP) como de canal virtual (VC) • De ellos el más importante es el nivel de VP, pues en general los recursos de la red son asignados inicialmente al VP y la capacidad del VP es compartida entre los diferentes VC
3.2.5 CONTROL DE PARAMETROS DE USO (UPC) (6) • En el I.371 se define un algoritmo que verifica de manera continua el comportamiento del tráfico. • Modificando los parámetros que se le pasan puede implementar diversas funciones: • Control de la velocidad de pico de celdas y de la variación del retardo de celdas asociada • Control de la velocidad sostenible de celdas y de la tolerancia a la aparición de ráfagas asociada
3.2.5 UPC: GENERIC CELL RATE ALGORITHM • Generic Cell Rate Algorithm (GCRA) • Este algoritmo está basado en la idea del “cubo goteante” o Leacky Bucket • El algoritmo de GCRA es una forma de controlar el tráfico. Esto ocurre cuando un flujo de datos es regulado de manera que las celdas que exceden un cierto valor de prestaciones son descartadas o marcadas • La idea consiste en disponer de un recipiente de capacidad limitada, en el que la fuente de tráfico añade contenido en relación a su velocidad de transmisión y del que se extrae contenido a una velocidad constante • Se deben fijar dos parámetros: la capacidad del recipiente y la velocidad de drenado
Tráfico de entrada Tráfico perdido Capacidad Ocupación Tráfico de salida 3.2.5 UPC: GENERIC CELL RATE ALGORITHM (2) • Si durante un periodo demasiado largo, el aporte de la fuente es superior al de drenado, el recipiente se llena, y se pierde parte de la información emitida • La velocidad de drenado corresponde a la velocidad media contratada y la capacidad del recipiente da una idea del volumen de información durante el cual se toma esta medida de la media
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICO • GCRA para el control de la velocidad de pico de celdas y de la variación de retardo de celdas asociada • Un tráfico es adecuado si la velocidad de pico de transmisión de celdas no excede la velocidad de pico de celdas acordada. Este algoritmo supervisa el acuerdo
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICO (2) • Hay dos versiones equivalentes del algoritmo: el algoritmo de planificador virtual y el algoritmo de “leaky bucket” • Supongamos que hemos especificado una velocidad de pico R y un límite a la variación del retardo de celdas . • Si no hay variación del retardo de celdas, el tiempo entre llegadas de celdas es T=1/R • Si hay variación del retardo de celdas, T es la media del tiempo entre llegadas de celdas cuando la fuente emite a la velocidad de pico. • En este caso el algoritmo para el control de la velocidad de pico de celdas y de la variación del retardo de celdas asociadas es expresado como GCRA(T, )
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL • El algoritmo se inicializa con la llegada de la primera celda de la conexión en el instante ta(1) • Durante su ejecución actualiza el tiempo de llegada teórico (TAT): la estimación del instante de llegada para la próxima celda. • Si la celda llega mas tarde que el TAT, entonces está conforme y el TAT se actualiza con el instante de llegada ta(k) más T • Si la celda llega antes que el TAT pero después que el (TAT - ),la celda es aún conforme y el TAT es incrementado en T. En este último caso, la celda que llega antes es conforme porque aún está dentro de la variación del retardo de celda “permitido” • Si la celda llega demasiado pronto, antes que el (TAT - ), entonces esta fuera de la variación del retardo de celda “permitido” y es declarada como no conforme. En este caso el TAT no cambia
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (2) ta(k) = Tiempo de llegada de una celda T = I = Incremento = L = Límite TAT: Tiempo de llegada teórico La celda llega más tarde que el tiempo de llegada teórico (su velocidad es menor) Llegada de la celda k en el instante ta(k) En el tiempo de llegada ta(1) de la primera celda de la conexión, TAT = ta(1) TAT < ta(k) ? Si La celda llega demasiado pronto (su velocidad es mayor) No TAT ta(k) TAT > ta(k)+ ? Celda no conforme Si No La celda llega pronto (su velocidad es mayor) pero dentro de los límites permitidos TAT TAT + T Celda conforme
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (3) • Hay que tener en cuenta que no es posible acumular crédito • Si una celda llega tarde, lo que significa que ha habido un periodo desocupado en esta conexión, el siguiente valor del TAT es actualizado con el valor de la llegada actual, en lugar del actual valor del TAT • Si no hubiéramos seguido esta regla y simplemente se incrementara el TAT en T después de la llegada de cada celda, después de un largo periodo de desocupación la celda podría enviar un gran flujo de celdas a la velocidad máxima • Esto podría crear un flujo no considerado en la asignación de recursos de la red
Celda no conforme Celda conforme Celda conforme ta(k) < TAT - TAT no cambia TAT - < ta(k) TAT TAT TAT + T TAT < ta(k) TAT ta(k) + T TAT - TAT 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (4)
ta(1) ta(2) ta(3) ta(4) ta(5) ta(i) Time T T X+LCT (TAT) Llegada de celdas ideal ( = 0.5 ) 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (5) El tiempo para insertar una celda es y el tiempo entre llegadas de celdas es 4.5 . Por lo tanto, la velocidad de pico es igual a la velocidad del enlace dividido por 4.5 En este caso se permite la mínima variación en el retardo de celdas ( = 0.5 ), precisamente la suficiente teniendo en cuenta que los datos se transmiten en celdas y por lo tanto cada llegada de celda debe ser un entero múltiple de Debido a esta tolerancia tan pequeña, el tiempo de llegada de celdas nunca puede tender muy lejos del TAT
ta(i) Time T T X+LCT (TAT) Llegada de celdas posible ( = 1.5 ) 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (6) Si la variación en el retardo de celdas ( ) “permitido” se incrementa, la llegada de una celda puede alejarse del TAT.
ta(i) Time T T X+LCT (TAT) Llegada de celdas posible ( = 3.5 ) 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (7) Cuando aumenta la variación en el retardo de celdas, la potencialidad de que las celdas se agrupen, que es el fenómeno que puede cargar la red, incrementa. El grado mayor de agrupamiento ocurre cuando una fuente puede transmitir múltiple celdas juntas, es decir, a la velocidad máxima del enlace. Esta condición ocurre cuando excede T - . Especificamente, para > T - , el máximo número N de celdas juntas conformes que se puede transmitir es igual a N = 1+ ( / (T - )) donde x es la parte entera de x
ta(i) Time T T X+LCT (TAT) Llegada de celdas posible ( = 7 ) 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE PLANIFICADOR VIRTUAL (8) En este caso, podemos obtener el valor de N sustituyendo en la siguiente fórmula N = 1+ ( / (T - )) = 1+ (7 / (4.5 - )) = 1+ (7 / 3.5) = 1+ 2 = 3 En ejemplo anterior, el valor de N es N = 1+ ( / (T - )) = 1+ (3.5 / (4.5 - )) = 1+ (3.5 / 3.5) = 1+ 1 = 2
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE “LEAKY BUCKET” • El algoritmo mantiene un contador X con la cantidad de datos enviados. • El contador es decrementado a una velocidad constante de una unidad por unidad de tiempo hasta el valor mínimo 0; esto es equivalente a un cubo que se vacía a velocidad 1. • El contador es incrementado en I unidades cuando llega una celda, teniendo en cuenta la restricción de que I + L es el máximo valor • Cualquier celda que llega que cause que el contador excede este valor máximo es declarada como no conforme; esto es equivalente a un cubo con capacidad I + L
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE “LEAKY BUCKET” (2) • El algoritmo define un cubo de capacidad finita que se vacía a velocidad continua de 1 unidad por unidad de tiempo y cuyo contenido es incrementado en T unidades por cada celda conforme. • La capacidad total del cubo es T + • Después de la llegada de la celda k, ta(k), el algoritmo mira si el cubo esta desbordado. Si es así, la celda no es conforme. Sino lo está, el cubo se incrementa. • La cantidad de incremento depende de si el cubo ha sido totalmente vaciado entre la llegada de celdas
3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE “LEAKY BUCKET” (3) Llegada de la celda k en el instante ta(k) ta(k) = Tiempo de llegada de una celda T = I = Incremento = L = Límite X = valor del contador del leaky bucket X’ = variable auxiliar LCT = último tiempo conforme X’ X - ta(k)-LCT X’ < 0 ? En el tiempo de llegada ta(1) de la primera celda de la conexión, X = 0 y LCT = ta(1) Si X’ 0 No X’ > ? Celda no conforme Si No X’ X’ + T LCT ta(k) Celda conforme
Celda no conforme Y > + T; X Y Celda conforme T Y + T; X Y Celda conforme Y < T; X T Y T X t = LCT t = ta(k) Y= X - (ta(k) -LCT) + T 3.2.5 UPC: GCRA - CONTROL VELOCIDAD DE PICOALGORITMO DE “LEAKY BUCKET” (4) • La siguiente figura ilustra el algoritmo; la parte de la izquierda muestra el estado del cubo después de que una celda ha sido procesada y la parte derecha muestra el estado del cubo después de que una nueva celda llegue
3.2.5 UPC: GCRA - CONTROL VELOCIDAD SOSTENIBLE • GCRA para el control de la velocidad sostenible y de la tolerancia a la aparición de ráfagas asociada Este algoritmo • sirve como una definición operacional de la relación entre la velocidad sostenible de las celdas y la tolerancia a las ráfagas • y puede ser usado por el control de parámetros de uso para monitorizar la conformidad con el tráfico contratado