Download

1 / 40
410 likes | 693 Views
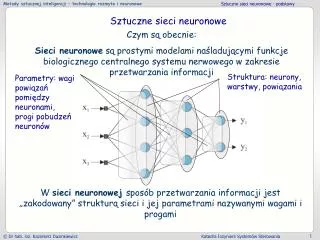
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ. UKŁADY WSPÓŁRZĘDNYCH, ODWZOROWANIA KARTOGRAFICZNE. PLAN PREZENTACJI Współrzędne geograficzne, elipsoidalne Powszechnie stosowane elipsoidy Odwzorowania kartograficzne – definicja podział Odwzorowania wiernokątne, wiernopolowe, wiernoodległościowe

E N D
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ UKŁADY WSPÓŁRZĘDNYCH, ODWZOROWANIA KARTOGRAFICZNE
PLAN PREZENTACJI • Współrzędne geograficzne, elipsoidalne • Powszechnie stosowane elipsoidy • Odwzorowania kartograficzne – definicja podział • Odwzorowania wiernokątne, wiernopolowe, wiernoodległościowe • Algorytmy upraszczania danych • Algorytm Douglasa-Peuckera, algorytm redukcji liczby wierzchołków • Pojęcie odległości, normy wektora, iloczynu skalarnego • Reprezentacje prostych • Odległość punktu od prostej
MAPY – DEFINICJA Mapa (z łac. mappa = 'obrus') - uogólniony obraz powierzchni Ziemi lub jej części (także nieba lub planety czy innego ciała niebieskiego), wykonywany na płaszczyźnie, w skali, według zasad odwzorowania kartograficznego, przy użyciu znaków graficznych. Mapa stanowi podstawowe narzędzie badań i prezentacji wyników m.in. w historii, geografii i geodezji. Mapa jest to obraz fizycznej powierzchni ziemi na płaszczyźnie w przyjętym odwzorowaniu kartograficznym i założonej skali z symbolicznym przedstawieniem obiektów i ukształtowania. Treść map - znaki umowne, punkty wysokościowe (pikiety), warstwice, siatka współrzędnych, opisy. Skala mapy – zależność pomiędzy długością odcinka łączącego 2 punkty na mapie i odległością odpowiadających im punktów na powierzchni odniesienia 1 : M.
Skala mapy Skala mapy ( tzn. podziałka mapy) - stosunek wielkości modelu Ziemi, dla jakiego opracowano odwzorowanie kartograficzne danej mapy do rzeczywistej wielkości Ziemi. Rodzaje zapisu skal na mapach: • skala liczbowa 1:700 000 lub (zapis ten przeważnie poprzedza się słowem "skala") • skala mianowana 1 cm - 1 km lub 1 cm → 1 km (zapis ten przeważnie poprzedza się słowem "skala") • skala polowa 1 mm² - 1000000 m² lub 1 mm² → 1000000 m² • podziałka liniowa jest graficznym przedstawieniem skali na mapie, często umieszcza się ją pod skalą liczbową lub mianowaną (jeżeli podana jest sama podziałka nie używa się dla niej słowa "skala") • podziałka złożona - stosowana dla map świata w odwzorowaniach niewiernoodległościowych (tzn. np. na równiku 1 cm na mapie odpowiada innej odległości w rzeczywistości niż ten sam 1 cm na mapie na równoleżniku 60°).
Przeniesienie powierzchni ze sfery (Ziemia nie jest idealną kulą, ma nieregularny kształt geoidy, ale przy sporządzaniu mapy przyjmuje się założenie o jej kulistości, lub że jest elipsoidą obrotową) na płaską powierzchnię mapy wymaga: • zastosowania odpowiedniego rzutu, czyli odwzorowania kartograficznego, • zmniejszenia obrazu do żądanej skali, • zastosowania przyjętych znaków umownych -legenda mapy, • uogólnienia przedstawionego obrazu. • Nauka o mapach to kartografia. Znaki kartograficzne to symboliczne oznaczenia, za pomocą których wyraża się treść mapy.
Odwzorowaniem jednej powierzchni w drugą nazywamy każdą wzajemnie jednoznaczną odpowiedniość punktową między powierzchnią nazywaną oryginałem a powierzchnią nazywaną obrazem. • Odwzorowanie kartograficzne jest umownym, określonym matematycznie sposobem przyporządkowania punktom powierzchni elipsoidy (lub kuli) punktów na płaszczyźnie. • W zastosowaniach GIS (tym kartografii) powierzchnia oryginału i powierzchnia obrazu są powierzchniami regularnymi. W odwzorowaniach regularnych: • obrazem punktu jest punkt • obrazem krzywej jest krzywa • obrazem kąta jest kąt • obrazem powierzchni jest powierzchnia
Wybór odwzorowania dla map uwzględnia przede wszystkim kryterium występujących na mapie zniekształceń odwzorowawczych. • Według tego kryterium można wyróżnić odwzorowania: • wiernokątne, mB=mL • wiernopolowe, mB*mL=1 • wiernoodległościowe, mB=1, lub mL=1 • „dowolne”
Geoidę definiuje się jako tę powierzchnię ekwipotencjalną potencjału siły ciężkości, która pokrywa się ze średnim poziomem mórz i oceanów. Odzwierciedla ona własności fizycznej budowy Ziemi, nieciągłości jej krzywizny odpowiadają nieciągłościom gęstości w rozkładzie mas we wnętrzu Ziemi
Powierzchnie odniesienia płaszczyzna
Powierzchnie odniesienia i współrzędne • Szerokość geodezyjna B punktu na elipsoidzie i jej związek z szerokością geograficzną na kuli.
Układ odniesienia (DATUM) oprócz nazwy elipsoidy określa jej położenie względem środka ciężkości Ziemi lub innych punktów. Rozróżniamy układy odniesienia lokalne i globalne.
Odwzorowania wiernokątne Odwzorowanie kartograficzne oddające wszystkie właściwości oryginalnej sfery powinien być dokładnie – perfekcyjnie równoodległe, to znaczy odległości między dowolnymi dwoma punktami powinny zachowywać ten sam stosunek zarówno na mapie i na sferze. W ten sposób, także wszystkie kształty zostają zachowane. Mapa na płaszczyźnie nie może spełnić tej właściwości (np. punkty na krawędzi mapy). W wielu zastosowaniach kartograficznych oraz pewnych rodzajach nawigacji słabszy warunek – poprawność kształtu jest najbardziej podstawowym wymaganiem. Kąt między dowolnymi dwoma liniami na sferze musi być taki sam jak kąt między tymi liniami w odwzorowaniu kartograficznym na mapie. W szczególności, wszystkie południki muszą przecinać równoleżniki pod kątem prostym. Ponadto skala w dowolnym punkcie musi być taka sama we wszystkich kierunkach. Wiernokątność jest ściśle lokalną właściwością: kąty (a zatem i kształt) nie mogą być zachowane w dalszej odległości od punktu przecięcia. W rzeczywistości linie proste na sferze zostają odwzorowane jako linie zakrzywione na płaszczyźnie i odwrotnie. Odwzorowania równokątne znajdują zastosowanie w odwzorowaniach wielkoskalowych, natomiast są rzadko stosowane w mapach całych kontynentów lub świata. Ponieważ odwzorowanie równokątne nie może być jednocześnie wiernopolowym, odwzorowania wiernokątne nie są stosowane w zastosowaniach statystycznych, gdzie porównanie rozmiaru jest powszechnie wykonywaną operacją.
Odwzorowania wiernokątne – standardowe Podstawowe odwzorowania wiernokątne: Stereograficzne płaszczyznowe, zachowujące kształt każdego okręgu na sferze Odwzorowanie Merkatora, walcowe w normalnym aspekcie posiada proste, pionowe południki, umożliwiając bezpośredni pomiary bearing. Odwzorowanie równokątne stożkowe, ogólny przypadek odwzorowania Punkty osobliwe: punkty odwzorowane w nieskończoności punkty, gdzie nie jest zachowana równokątność W szczególności (w aspekcie normalnym), odwzorowanie stereograficzne płaszczyznowe nie odwzorowuje punktu przeciwległego środkowi odwzorowania. Odwzorowanie Merkatora nie obejmuje dwu biegunów, a odwzorowanie stożkowe równokątne z pojedynczym biegunem, nie zachowującym równokątności (ponieważ suma kątów wszystkich południków jest mniejsza od 360 stopni). Odwzorowanie Lagrange’a W roku 1772, Joann Lambert przedstawił odwzorowanie wiernokątne o następujących właściwościach: na sferze, odległości południków zmniejszano o czynnik n na sferze zmienia się odległości między równoleżnikami w celu uzyskania równokątności zastosowanie odwzorowania płaszczyznowego stereograficznego w aspekcie równikowym Lambert przedstawił ogólny przypadek dla dowolnego n i centralnego równoleżnika, najczęściej wykorzystywany przypadek dla równika z n = 0.5 znany jest pod nazwą odwzorowania Lagrange’a. Joseph Lagrange’a uogólnił odwzorowanie na przypadek elipsoidy. Odwzorowanie Lagrange’a przedstawia cały świat na powierzchni okręgu. Z powodu zastosowania odwzorowania stereograficznego, wszystkie południki i równoleżniki są łukami okręgów ( środkowy południk i równoleżnik jest linią prostą). Skala zostaje silnie zniekształcona przy biegunach. Odwzorowanie rzadko stosowane praktycznie, jednakże stanowi podstawę szeregu pochodnych odwzorowań równokątnych, gdyż odwzorowanie sfery na koło jest fundamentalnym krokiem w tworzeniu odwzorowania wiernokątnego.
Odwzorowania stożkowe • Odwzorowania stożkowe w aspekcie biegunowym posiadają cechy: • południki są prostymi liniami, równoodległymi, zbieżnymi w punkcie, który może być biegunem, ale nie musi. W porównaniu do sfery, odległość kątowa między południkami jest zawsze zredukowana o stały czynnik, zwany czynnikiem stożkowym • równoleżniki są łukami okręgów, koncentrycznych w punkcie zbieżności południków. W wyniku tego, równoleżniki przecinają wszystkie południki pod kątem prostym. Zniekształcenie jest stałe wzdłuż każdego równoleżnika. • W celach zilustrowania, wynikowa płaszczyzna może zostać nawinięta na stożek z wierzchołkiem odwzorowywanej sfery, jednakże niewiele odwzorowań jest opartych na prawdziwej geometrycznej perspektywie (innymi słowy, stożek otrzymujemy zawsze w wyniku odwzorowania, jednakże rzadko bezpośrednio podczas tworzenia odwzorowania). Najczęściej stożek przecina sferę w jednym lub dwu wybranych równoleżnikach, zwanych standardowymi liniami. • Prosta konstrukcja i wzorzec zniekształcenia, powoduje, że jego stosowanie w regionalnych i państwowych mapach stref umiarkowanych (podczas gdy mapy płaszczyznowe i walcowe są odpowiedniejsze dla stref biegunowych i tropikalnych), w szczególności dla obszarów ograniczonych dwoma położonymi niedaleko południkami, takimi jak Rosja lub USA. Z drugiej strony odwzorowania stożkowe rzadko nadają się dla map całego świata. • Istnieje tylko jeden rodzaj odwzorowania stożkowego wiernopowierzchniowego, i tylko jedno jest wiernokątne. • Ograniczenia są osłabione w odwzorowaniach pseudostożkowych (z zakrzywionymi południkami) oraz polistożkowych (z niekoncentrycznymi równoleżnikami).
Odwzorowanie Lamberta wiernokątne stożkowe Standardowy równoleżnik 50°N and 10°S, obciete przy 50°S.
UPRASZCZANIE OBIEKTÓW LINIOWYCH W szeregu zastosowaniach, podczas przetwarzania danych, w tym danych geograficznych, poszczególne składowe obiektów, znajdują się w bezpośredniej bliskości. Podczas operacji odrysowywania takich obiektów, składowe tych obiektów redukują się do pojedynczych punktów. Względy wydajności i efektywności przetwarzania danych wymagają doprowadzania do sytuacji, w której zdegenerowane do punktu linie nie są odrysowywane. W tym celu konieczne jest zredukowanie liczby wierzchołków i krawędzi obiektów polilinii do jedynie tych istotnych i zapewniających odpowiednią rozdzielczość w ramach konkretnego zastosowania. Opracowano kilka algorytmów mających na celu aproksymowanie obiektu polilinii o dużej rozdzielczości (liczbie wierzchołków) mniejszą ich liczbą. Zastosowanie algorytmu redukcji liczby wierzchołków wpływa ponadto także na szybkość działania pozostałych algorytmów, takich jak na przykład wypełnianie powierzchni lub określanie przecięć, które mają zostać wykorzystane do obiektów polilinii i poligonów
Pierwszym algorytmem, najprostszym i zarazem najczęściej wykorzystywanym do zmniejszania liczby punktów prostych jest szybki algorytm redukcji wierzołków o złożoności O(n). Algorytm jest najszybszym oraz zarazem najmniej skomplikowanym algorytmem z dostępnych algorytmów jednak z stosunkowo małą dokładnością wyników. Z tego względu algorytm redukcji wierzchołków zostaje połączony z bardziej dokładnymi algorytmami upraszczania, które za dane wejściowe pobierają zredukowane w ten sposób obiekty i dalej przetwarzają te dane w sposób wolniejszy, jednak zarazem bardziej dokładnie. Najbardziej znanym algorytmem upraszczania obiektów liniowych jest klasyczny algorytm Douglasa – Peuckera (DP) aproksymacji obiektów liniowych wykorzystywany szeroko w grafice komputerowej oraz systemach GIS. Istnieją dwa warianty algorytmu DP, oryginalna metoda O(n2) [Douglas & Peucker, 1973] oraz nowsza wersja O(n log n) one [Hershberger & Snoeyink, 1992]. Metoda druga, pomimo oferowania zysku czasowego, wiąże się ze skomplikowaną implementacją oraz ograniczeniem zastosowania jedynie do obiektów dwuwymiarowych.
Definicja prostej, reprezentacje prostych odległość punktu od prostej Wyznaczanie odległości punktu od linii stanowi podstawową operację w grafice komputerowej, geometrii obliczeniowej oraz wszystkich dziedzinach wykorzystujących reprezentacje graficzne obiektów, tym w dziedzinie GIS. Powszechnie stosowane są podstawowe wzory na obliczanie odległości między punktami a innymi obiektami, w tym między liniami,. Jednakże bardzo często, konkretne rozwiązania wymagają stosowania tych a nie innych wzorów, co uzależnione jest rodzaju posiadanych danych i definicji problemu. W dalszych rozważaniach, konieczne będzie określenie metryki, czyli zdefiniowanie odległości między dwoma dowolnymi punktami badanej przestrzeni, w naszym przypadku przestrzeni Euklidesowej. Najczęściej do tego celu wykorzystywana jest standardowa Euklidesowa norma L2. W ten sposób, dla n-wymiarowego wektora v=(v1,v2,...,vn), jego długość definiowana jest jako |v|: W przypadku dwu punktów P=(p1,p2,...,pn) i Q=(q1,q2,...,qn), odległość między tymi punktami wynosi:
Reprezentacje prostych Punktowa. Podstawowym sposobem zdefiniowania konkretnej linii L jest podanie dwu różnych punktów P0 i P1 leżących na tej linii. Linię L można również zdefiniować jako punkt z określonym kierunkiem. Niech L będzie punktem na linii a vL będzie niezerowym wektorem podającym kierunek linii. Równanie prostej Proste definiowane mogą być ponadto z wykorzystaniem współrzędnych punktów na linii jako niewiadomymi. Najczęściej spotykanymi reprezentacjami tego typu są podane w poniżej tabeli.
Konwersja między poszczególnymi reprezentacjami Zamiana między poszczególnymi reprezentacjami linii nie przedstawia większych trudności. Przykładowo, mając zadane dwa punkty P0=(x0,y0) i P1=(x1,y1) na linii 2D, określanie postaci niejawnej prostej wykonuje się poprzez przyjęcie vL=(xv,yv)=P1-P0=(x1-x0, y1-y0) za wektor kierunkowy prostej, wektor prostopadły do L ma postać nL=(-yv,xv)=(y0-y1,x1-x0) (gdyż nL·vL= 0). Równanie niejawne prostej L przyjmuje postać: W przypadku prostej 2D zdefiniowanej za pomocą niejawnego równania f(x,y) = ax+by+c = 0, dla dowolnego punktu 2D P=(x,y), odległość punktu od prostej d(P,L) można obliczyć na podstawie według:
Postać parametryczna prostej W celu obliczenia odległości d(P,L) (w dowolnej n-wymiarowej przestrzeni) od dowolnego zdefiniowanego punktu P do prostej L przedstawionej równaniem parametrycznym wykonywane zostają następujące operacje. Niech P(b) będzie punktem przecięcia prostopadłej z punktu P poprowadzonej do prostej L. Parametryczne równanie prostej dane jest w postaci: P(t)=P0 + t (P1-P0). W takim przypadku, wektor P0P(b) przedstawia rzut wektora P0P na odcinek P0P1, sytuacja przedstawiona na poniższym rysunku: Przy vL=(P1-P0) i w=(P-P0), otrzymujemy: w ten sposób: przy uL będącym kierunkowym wektorem jednostkowym wektora L. Zaletą metod jest możliwość zastosowania dla przestrzeni dowolnego wymiaru n.
1) Transformacja atrybutów - klasyfikacja Selekcja tematyczna – wybranie podzbioru atrybutów (klas) , które są istotne dla danego zastosowania (problemu) Agregacja tematyczna – zmiana rozdzielczości tematycznej – łączenie hierarchii klas 2) Transformacja przestrzenna a) Poszczególne obiekty I) Upraszczanie – symplifikacja: A1) przesiewanie – linia zostaje reprezentowana poprzez podzbiór punktów linii wejściowej A2) swobodne upraszczanie – reprezentacja linii poprzez dowolne punkty, a nawet poprzez ich większą liczbę II) zapadanie – zmiana wymiarowości danych III) wzmocnienie Geometryczne ograniczenia A1) Powiększenie rozmiaru – stałe skalowanie we wszystkich kierunkach A2) Nieproporcjonalne powiększenie – odnosi się tylko do pewnych fragmentów – prowadzi do zmiany kształtu Ograniczenia znaczeniowe A3) Wygładzanie – lepszy wizualnie efekt A4) Fraktalizacja A5) Rektyfikacja – nadanie kształtu prostokątów / kwadratów b) poszczególne obiekty lub zbiór obiektów IV) selekcja / eliminacja A6) selekcja – wybór najbardziej ważnych obiektów reprezentujących cechy – właściwości obiektów poddawanych operacji upraszczania A7) eliminacja – usuwanie obiektów, które nie są ważne V) przemieszczenie obiektów, które znajdują się zbyt blisko siebie VI) agregacja A1) dodanie atrybutów do jednego obiektu a1) amalgamacja – fuzja (agregacja dwu sąsiadujących obiektów tego samego typu), scalanie (dwa obiekty nie sąsiadujące z sobą) a2) połączenie zbioru obiektów do jednego obiektu o większym wymiarze A2) dołączenie atrybutów kilku obiektów Typowanie – transformacja zbioru obiektów na inny zbiór obiektów