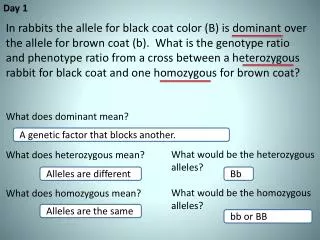
Download
1 / 19
200 likes | 417 Views
What does it mean when we “control the speed”?.

E N D
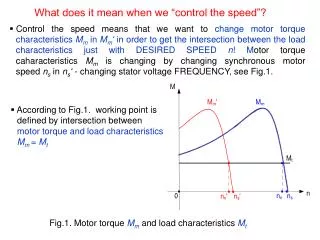
What does it mean when we “control the speed”? • Control the speed means that we want to change motor torque characteristics Mm in Mm‘ in order to get the intersection between the load characteristics just with DESIRED SPEED n! Motor torque caharacteristics Mm is changing by changing synchronous motor speed ns in ns‘ - changing stator voltage FREQUENCY, see Fig.1. • According to Fig.1. working point is defined by intersection between motor torque and load characteristics Mm= Mt Fig.1. Motor torque Mm and load characteristics Mt
Electromechanical Systems – how to change the speed of IM (1) • Speed of the motor is: • The change of the pair poles is possible only in discrete way, i.e. 1, 2, 3, .. pair poles. That kind of speed control was used in the past time, when .power electronics components were expansive. For some discrete pair poles values, and constant frequency, the synchronous speed is: • Keeping frequency constant, f= 50 Hz, and changing the pole pairs, we get for: • p=1, synchronous speed is 3000 rpm, • p=2, synchronous speed is 1500 rpm, • p=3, synchronous speed is 1000 rpm. • Example: IM for washing machine. Motor has two windings, one with 2p=2,(for high speed) and another with 2p=12, for low speed (14). Switching windings from 2 poles to 12 poles configuration by mechanical switch, we switch speed from 3000 rpm to 500 rpm!
IM speed control by stator voltage • If the voltage supply changing under constant frequency, machine torque is changing according to Mem~f(U2).For any other voltage motor has new characteristics. Because load characteristics usually doesn’t change, then working point will be defined by motor’s characteristics. We have two working points at nt and nf; load is Mt, voltage is Un and 0,8Un Fig. 2. Voltage control characteristics M=f(U), a), Motor’s characteristics with nominal stator voltage Un and 0,8Un; load is Mt, b) . b) a) • Define positive and negative aspects of IM voltage control ?
IM speed control by stator voltage and frequency • Rotor speed is directly proportional to frequency, (3) • Changing the frequency, magnetic field (induction) in motor changes as well. As a consequence, developed torque is changes. (4) (5) (4) • If the stator voltage frequency f1 decrease and stator voltage keep constant, magnetic induction B as well as magnetic field Φ will increase. Increasing induction B is not acceptable because of magnetic saturation. If the frequency f1 increase, magnetic fieldΦdecrease(5), as well as motor torque (not desired!). Because of that, speed is controlled by (7): (7) (6)
IM speed control by stator voltage and frequency • It is clear why we want to control the speed of induction motor by U/f=const.(3). Main reason is that changing the voltage and frequency in the same way, magnetic field keeps constant !!! • Frequently, for such control we use the term SCALAR CONTROL !! a) b) • Fig. 3. Motor torque characteristics (f1-f3) with scalar control, a), motor torque characteristics (f1-f5) with load torque characteristics, b).
U/f=const. control for different type of loads a) b) Fig. 4. Motor torque characteristics (in the region of small slip) with different frequencies - with constant load, a) and centrifugal load b). • For one case study, choose one frequency (one motor characteristics) and compare the slip for constant and centrifugal load. Comment!!
Scalar control (U/f=const.) for extendedspeedregion Region of constant maximal Torque and constant maximal Power • f1 is base frequency for which is motor is built. Decreasing the voltage U1 and base frequency f1 we are getting new characteristics, U21 / f21= const. ,ie. voltage and frequency are decreased proportionaly. This reagion is called Constant torque region. • Increasing frequency and voltage according U/f = const. is not alowed, because voltage transcend nominal value! Increasing only frequency (without increasing voltage) magnetic fields (6) and motor torque (4) decreasing. This is the region of field weakening, or Constant power region.
Scalar control in extended speed region Područje konstantnog momenta Područje konstantne snage
Control of Induction slip-ring motor Speed control changing stator voltage (phase control)
Slip-ring asynchrpnous machine R20 – rotor winding resistor 3 external rotor resistors, R2d 3 rotor rings
Asynchronous motor (slip ring motor) Influence of the external, rotor resistor on rotor curent characteristics in dependence of the slip (motor speed)
Advanced industrial application based on the slip/ring motor
4q drive with slip-ring motor Motoring Generating mode (B) Revers current braking Revers current braking Motoring Generating mode (A)
4q drive with slip-ring motor ASINKRONI kliznokolutni MOTOR
4q drive with slip-ring motor ASINKRONI kliznokolutni MOTOR
4q drive with slip-ring motor ASINKRONI kliznokolutni MOTOR (4q pogon