Download
1 / 68
700 likes | 845 Views
Lecture 7:Rotational motion. Physics 1, NTC. Angular Motion, General Notes.

E N D
Lecture 7:Rotational motion Physics 1, NTC
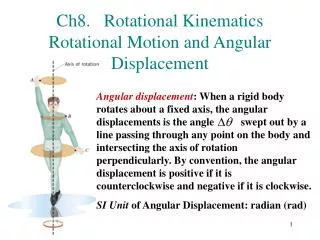
Angular Motion, General Notes • When a rigid object rotates about a fixed axis in a given time interval, every portion on the object rotates through the same angle in a given time interval and has the same angular speed and the same angular acceleration. • So q, w, a all characterize the motion of the entire rigid object as well as the individual particles in the object. Section 10.1
Angular Position • As the particle moves, the only coordinate that changes is q • As the particle moves through q, it moves though an arc length s. • The arc length and r are related: • s = q r Section 10.1
Comparing degrees and radians Converting from degrees to radians Conversions Section 10.1
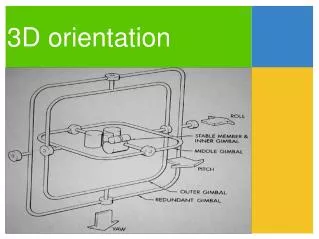
Directions • Strictly speaking, the speed and acceleration (w, a) are the magnitudes of the velocity and acceleration vectors. • The directions are actually given by the right-hand rule. Section 10.1
Relationship Between Angular and Linear Quantities • Every point on the rotating object has the same angular motion. • Every point on the rotating object does not have the same linear motion. • Displacements • s = θ r • Speeds • v = ω r • Accelerations • a = α r Section 10.3
Acceleration Comparison • The tangential acceleration is the derivative of the tangential velocity. • Centripetal acceleration Section 10.3
Rotational Kinetic Energy • The total rotational kinetic energy of the rigid object is the sum of the energies of all its particles. • I is called the moment of inertia. • Rotational kinetic energy is not a new type of energy, the form is different because it is applied to a rotating object. • The units of rotational kinetic energy are Joules (J). Section 10.4
Moment of Inertia • Defined by dimensions = ML2 or unit of kg.m2. • Mass = inherent property, but the moment of inertia depends on the choice of rotational axis. • Moment of inertia is a measure of the resistance of an object to changes in its rotational motion, similar to mass being a measure of an object’s resistance to changes in its translational motion. • The moment of inertia depends on the mass and how the mass is distributed around the rotational axis. Section 10.5
Moment of Inertia, cont • For a continuous rigid object, imagine the object to be divided into many small elements, each having a mass of Δmi. • If r is constant, the integral can be evaluated with known geometry, otherwise its variation with position must be known. Section 10.5
Moments of Inertia of Various Rigid Objects Section 10.5
Moment of Inertia of a Uniform Rigid Rod • The shaded area has a mass • dm = l dx • Then the moment of inertia is Section 10.5
Moment of Inertia of a Uniform Solid Cylinder • Divide the cylinder into concentric shells with radius r, thickness dr and length L. • dm = r dV = 2p(rLr) dr • Then for I Section 10.5
9.4 Newton’s Second Law for Rotational Motion About a Fixed Axis Example 9 The Moment of Inertia Depends on Where the Axis Is. Two particles each have mass and are fixed at the ends of a thin rigid rod. The length of the rod is L. Find the moment of inertia when this object rotates relative to an axis that is perpendicular to the rod at (a) one end and (b) the center.
9.4 Newton’s Second Law for Rotational Motion About a Fixed Axis (b)
Parallel-Axis Theorem • In the previous examples, the axis of rotation coincided with the axis of symmetry of the object. • For an arbitrary axis, the parallel-axis theorem often simplifies calculations. • The theorem states I = ICM + MD 2 • I is about any axis parallel to the axis through the center of mass of the object. • ICM is about the axis through the center of mass. • D is the distance from the center of mass axis to the arbitrary axis. Section 10.5
Moment of Inertia for a Rod Rotating Around One End – Parallel Axis Theorem Example • The moment of inertia of the rod about its center is • D is ½ L • Therefore, Section 10.5
Torque • Torque, t, is the tendency of a force to rotate an object about some axis. • Torque is a vector, but we will deal with its magnitude here: • t = r F sin f = F d • F is the force • f is the angle the force makes with the horizontal • d is the moment arm (or lever arm) of the force • There is no unique value of the torque on an object. • Its value depends on the choice of a rotational axis. Section 10.6
Torqueis a vector! • The moment arm, d, is the perpendicular distance from the axis of rotation to a line drawn along the direction of the force. • d = r sin Φ • The horizontal component of the force (F cos f) has no tendency to produce a rotation. • Torque will have direction. • If the turning tendency of the force is counterclockwise, the torque will be positive. • If the turning tendency is clockwise, the torque will be negative. Section 10.6
Net Torque • The force will tend to cause a counterclockwise rotation about O. • The force will tend to cause a clockwise rotation about O. • St = t1 + t2 = F1d1 – F2d2 Section 10.6
Torque and Angular Acceleration, Extended • Consider the object consists of an infinite number of mass elements dm of infinitesimal size. • Each mass element rotates in a circle about the origin, O. • Each mass element has a tangential acceleration. • From Newton’s Second Law • dFt= (dm) at • The torque associated with the force and using the angular acceleration gives • dtext = r dFt = atrdm = ar2dm • This becomes St = Ia Section 10.7
Torque and Angular Acceleration, Extended cont. • rigid body under a net torque. • The result also applies when the forces have radial components. • The line of action of the radial component must pass through the axis of rotation. • These components will produce zero torque about the axis. Section 10.7
Falling Smokestack Example • When a tall smokestack falls over, it often breaks somewhere along its length before it hits the ground. • Each higher portion of the smokestack has a larger tangential acceleration than the points below it. • The shear force due to the tangential acceleration is greater than the smokestack can withstand. • The smokestack breaks. Section 10.7
9.3 Center of Gravity Conceptual Example 7 Overloading a Cargo Plane This accident occurred because the plane was overloaded toward the rear. How did a shift in the center of gravity of the plane cause the accident?
Summary of Useful Equations Section 10.8
9.2 Rigid Objects in Equilibrium Example 3 A Diving Board A woman whose weight is 530 N is poised at the right end of a diving board with length 3.90 m. The board has negligible weight and is supported by a fulcrum 1.40 m away from the left end. Find the forces that the bolt and the fulcrum exert on the board.
9.2 Rigid Objects in Equilibrium Example 5 Bodybuilding The arm is horizontal and weighs 31.0 N. The deltoid muscle can supply 1840 N of force. What is the weight of the heaviest dumbell he can hold?
9.3 Center of Gravity DEFINITION OF CENTER OF GRAVITY The center of gravity of a rigid body is the point at which its weight can be considered to act when the torque due to the weight is being calculated.
9.3 Center of Gravity When an object has a symmetrical shape and its weight is distributed uniformly, the center of gravity lies at its geometrical center.
9.3 Center of Gravity Example 6 The Center of Gravity of an Arm The horizontal arm is composed of three parts: the upper arm (17 N), the lower arm (11 N), and the hand (4.2 N). Find the center of gravity of the arm relative to the shoulder joint.
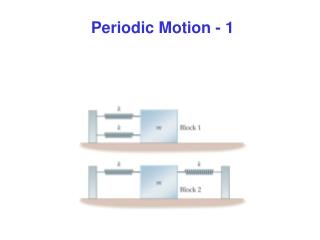
Energy in an Atwood Machine, Example • The system containing the two blocks, the pulley, and the Earth is an isolated system in terms of energy with no non-conservative forces acting. • The mechanical energy of the system is conserved. • The blocks undergo changes in translational kinetic energy and gravitational potential energy. • The pulley undergoes a change in rotational kinetic energy. • Find ? Section 10.8
Rolling Object • The red curve shows the path moved by a point on the rim of the object. • This path is called a cycloid. • The green line shows the path of the center of mass of the object. • In pure rolling motion, an object rolls without slipping. • In such a case, there is a simple relationship between its rotational and translational motions. Section 10.9
The tangential speed of a point on the outer edge of the tire is equal to the speed of the car over the ground.
Pure Rolling Motion, Object’s Center of Mass • The translational speed of the center of mass is • The linear acceleration of the center of mass is Section 10.9
Rolling Motion Cont. • Rolling motion can be modeled as a combination of pure translational motion and pure rotational motion. • The contact point between the surface and the cylinder has a translational speed of zero (c). Section 10.9
Total Kinetic Energy of a Rolling Object • The total kinetic energy of a rolling object is the sum of the translational energy of its center of mass and the rotational kinetic energy about its center of mass. K= ½ ICMw2 + ½ MvCM2 • The ½ ICMw2represents the rotational kinetic energy of the cylinder about its center of mass. • The ½ Mv2represents the translational kinetic energy of the cylinder about its center of mass. Section 10.9
Total Kinetic Energy, Example • Accelerated rolling motionis possible only if friction is present between the sphere and the incline. • The friction produces the net torque required for rotation. • No loss of mechanical energy occurs because the contact point is at rest relative to the surface at any instant. • In reality, rolling friction causes mechanical energy to transform to internal energy. • Rolling friction is due to deformations of the surface and the rolling object. Find and at the bottom of the incline? Section 10.9
9.5 Rotational Work and Energy Example 13 Rolling Cylinders A thin-walled hollow cylinder (mass = mh, radius = rh) and a solid cylinder (mass = ms, radius = rs) start from rest at the top of an incline. Determine which cylinder has the greatest translational speed upon reaching the bottom.
9.5 Rotational Work and Energy ENERGY CONSERVATION
9.5 Rotational Work and Energy The cylinder with the smaller moment of inertia will have a greater final translational speed.
The quantity AB sin q is equal to the area of the parallelogram formed by The direction of is perpendicular to the plane formed by . The best way to determine this direction is to use the right-hand rule. Vector Product (cross product) Section 11.1
The vector product is not commutative. The order in which the vectors are multiplied is important. If A//B(parallel q= 0o or 180o), then Therefore If Ais perpendicular to B, then The vector product obeys the distributive law. Properties of the Vector Product Section 11.1