Download
1 / 22
220 likes | 373 Views
Wireless Gesture-Based Control System for a Remotely Operated Vehicle Drone. Aaron Roberts Evan Wayton Eric Allar Michael Cremona April 27 th 2011 Faculty Advisors: Dr. Molyet and Dr. Kim Course Instructor: Dr. Serpen. Background. What is the purpose of our project?

E N D
Wireless Gesture-Based Control System for a Remotely Operated Vehicle Drone Aaron Roberts Evan Wayton Eric Allar Michael Cremona April 27th 2011 Faculty Advisors: Dr. Molyet and Dr. Kim Course Instructor: Dr. Serpen
Background What is the purpose of our project? • Wireless control of a remote vehicle based on user inputs. • Design a controller which can be utilized with one hand. • Hand gestures determine speed and direction of vehicle movements. • Utilize pitch and roll of hand to control speed and direction. • Proximity sensor detects, and causes reaction to eminent collisions. • Wireless video transmission permits use in non line of sight conditions. • Comply with NEMA 250 standard for electronic enclosures.
Background What is the importance of our project? • Intuitive user control interface • Eliminating the need to hold a controller What are the applications of our project? • Military use for remote inspection of terrain • Exploration of hazardous environments http://chrisnoble.wordpress.com/2007/06/page/3/
Discussion • Main Project Objectives: • System Design • Creation of Sub-systems • Critical Component Testing • Sub-system Testing & Integration
System Design • Features of the drone: • Intuitive gesture control • Wireless communication • Sensor override • Audio visual feedback
Creation of Sub-systems: • Gesture control • Motor control • Wireless communication • Sensor override • Glove power • Vehicle power • Video communication
System Architecture Gesture Controller Sub-System User Power Supply Sub-System Wireless Control Communication Sub-System Wireless Video Communication Sub-System Vehicle Power Supply Sub-System Drone Vehicle Sub-System Sensor Override Sub-System
Subsystems • Gesture Control Sub-system • Purpose • To provide the gesture commands that will control the drone. • Procedure • Loaded program, observed if expected values were shown. • Issues overcome • Overflowing ATmega328 serial buffer • Adjusting tolerances
Subsystems • Motor Control Sub-system • Purpose • To interpret commands sent to the drone and provide the appropriate movement. • Procedure • Ran program giving the micro-processor written commands. • Issues overcome • Skipping neutral and straight states of acceleration and turning • Length of the read in buffer
Subsystems • Wireless Communication Sub-System • Purpose • Reliable data transfer of user commands • Procedure • Installed ZigBees and confirmed wireless communication was identical to hard-wired communication.
Subsystems • Sensor Override Sub-System • Purpose • Collision Avoidance • Procedure • Added sensor code, tested functionality with overall design. • Issues overcome • Sensor detecting the ground as a possible collision
Subsystems • Power and Video Sub-Systems • Purpose • Provide Battery Power to Essential Components • Provide Wireless Video Transfer • Procedure • Powered circuits without using lab power supplies. • Tested video communication against ZigBee communication.
Power & Throughput Analysis ATmega328 1 MIPS @ 1 MHz 100 instructions Time 6.25us RadioShack Enercell rated at 2.13 AH at a 100 mA Glove Battery Life 23 hours Drone Battery Life 50 minutes
Communication Analysis Tx DC Power Rx DC Power
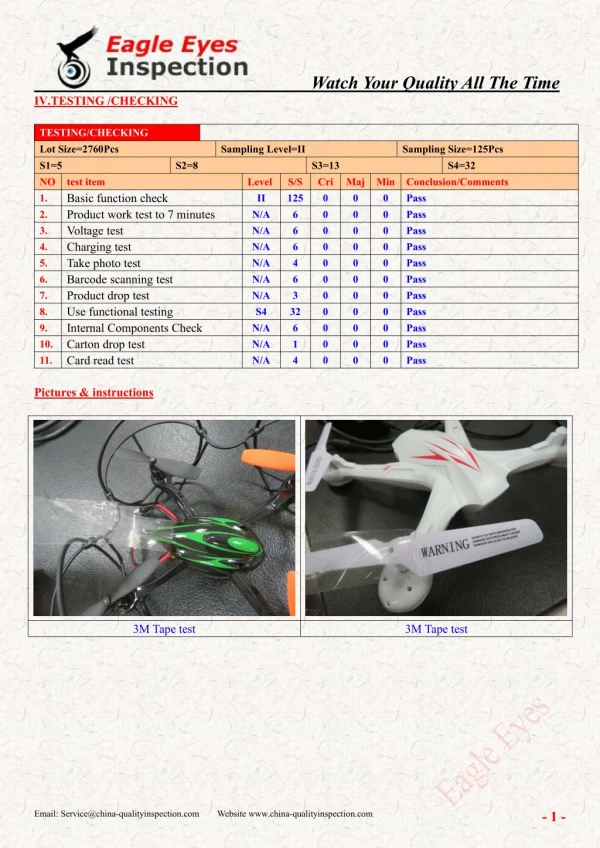
NEMA 250For Electrical Enclosures • Compliance with NEMA Standard • Involved various tests for foreign material. • Dust/Dirt • Water • Solid Objects
Conclusions • Lessons Learned • Design • Compliance • Future Plans/Improvements • Larger Drone • Power Supply • Feedback of Current State • Additional Sensors