Download
1 / 14
140 likes | 157 Views
This paper presents a probabilistic model for the synthesis and tracking of human motion using a recursive Bayesian formulation. The model incorporates non-linear motion with strong dependencies and uses a tree structure sorted with PCA coefficients for efficient search. It demonstrates the use of texture synthesis and motion examples to generate smooth and plausible-looking motion. The model can be applied to various motions in a database without the need for learning, making it suitable for stochastic search and Bayesian tracking.

E N D
Implicit Probabilistic Models of Human Motion for Synthesis and Tracking Hedvig Sidenbladh, KTH, Sweden (now FOI, Sweden) Michael J. Black, Brown University, USA Leonid Sigal, Brown University, USA
= model parameters I = image Recursive Bayesian formulation: Articulated 3D tracking
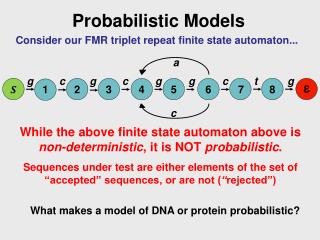
Non-linear motion, strong dependencies Extreme case Modeling Human Motion • Model dependencies analytically • e.g. [Hogg, Rohr] for walking • Dynamical models • e.g. [Wren&Pentland , Bruderlin&Calvert] • Learn from Mocap examples • e.g. [Bowden, Brand, Molina&Hilton]
Texture Synthesis Synthetic Texture “Database” • e.g. [De Bonnet&Viola, Efros&Leung, Efros&Freeman, Paztor&Freeman, Hertzmann et al] • Image(s) as an implicit probabilistic model. Efros & Freeman’01
Motion Texture • Motion examples as an implicit probabilistic model.
Sampling from , taking t = i Sampling from Database example i Generative model: Problem:Model for all motions i in the database! Probabilistic Formulation No learning required, all the variability in the data captured.
joint angles • No need to visit all database examples - only need to sample from distribution • Sort into tree-structure according to PCA coefficients time c =[c1, c2,c3,c4] Probabilistic Database Search • Sort database in some way to enable search in sublinear time • Linear search infeasible for large database!
Probabilistic Database Search Each level in the tree corresponds to one coefficient l. Sort examples i into tree: Left subtree for negative value of cl,i, right for positive value.
Approximated by sampling from tree iteratively: Probabilistic Database Search
Synthesis Goal:Generate smooth and plausible-looking motion. Running Walking Small database with running, walking, skipping, dance etc. Changing color indicates new example sequence. Future work: Add editing possibility, gravity model, goal function.
Tracking Goal:Efficiently generate samples (image data will sort out which are good). Temperature parameter controls randomness of tree search.
Arm Tracking Example 1000 samples ~1 min/frame Image likelihood model from [Sidenbladh & Black, ICCV 01] Constant velocity model Example based model
”Mocap Soup” [Cohen] at SIGGRAPH 02 • Arikan & Forsyth. Interactive motion generation from examples • Li et al. Motion textures: A two-level statistical model for character motion synthesis • Lee et al. Interactive control of avatars animated with human motion data • Kovar et al. Motion graphs • Pullen & Bregler. Motion capture assisted animation: Texturing and synthesis Here we formulate a probabilistic model suitable for stochastic search search and Bayesian tracking.
Probabilistic tree search - sampling from the tree approximates sampling from Conclusions • Implicit motion model - replace learning with search • Analog to example based texture synthesis • Larger database - sub-linear time search • Tree structure sorted with PCA coefficients