Download
1 / 1
30 likes | 276 Views
Inverse Depth to Depth Conversion in Monocular SLAM. Javier Civera 1 , Andrew J. Davison 2 and J. M. M. Montiel 1 1 University of Zaragoza, Spain 2 Imperial College, London, United Kingdom. This paper deals with point coding in real-time 6DoF EKF SLAM with a hand-held camera.

E N D
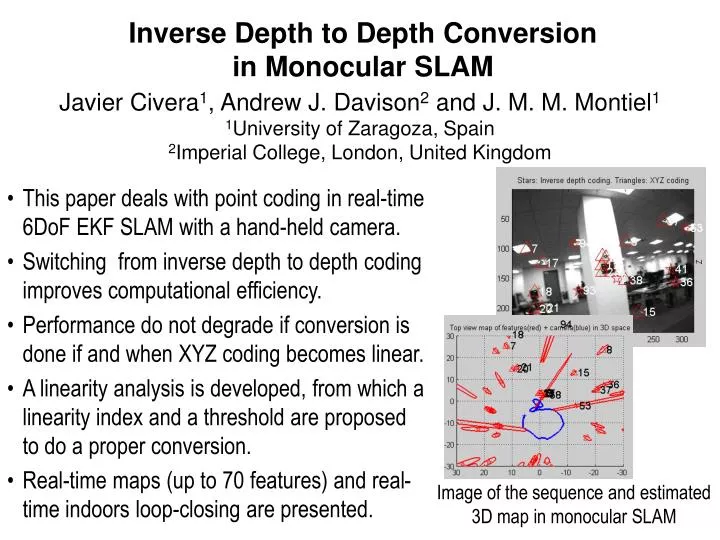
Inverse Depth to Depth Conversion in Monocular SLAM Javier Civera1, Andrew J. Davison2 and J. M. M. Montiel11University of Zaragoza, Spain2Imperial College, London, United Kingdom • This paper deals with point coding in real-time 6DoF EKF SLAM with a hand-held camera. • Switching from inverse depth to depth coding improves computational efficiency. • Performance do not degrade if conversion is done if and when XYZ coding becomes linear. • A linearity analysis is developed, from which a linearity index and a threshold are proposed to do a proper conversion. • Real-time maps (up to 70 features) and real-time indoors loop-closing are presented. Image of the sequence and estimated 3D map in monocular SLAM