Download
1 / 44
440 likes | 846 Views
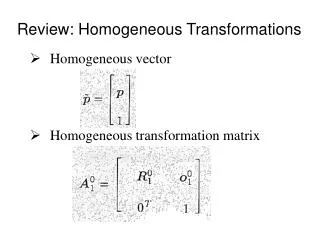
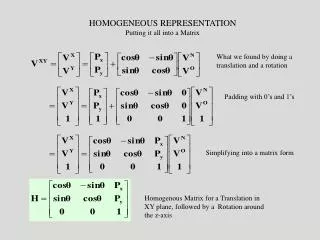
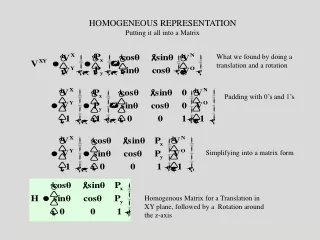
Homogeneous representation. Points Vectors Transformation representation. Lecture 4: Image formation. Image Formation. Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry Radiometry We consider only simple models of these.

E N D
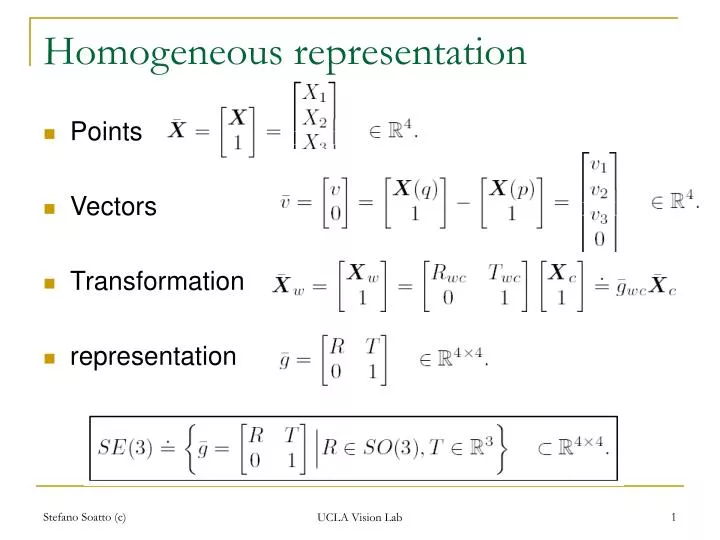
Homogeneous representation • Points • Vectors • Transformation • representation UCLA Vision Lab
Lecture 4: Image formation UCLA Vision Lab
Image Formation • Vision infers world properties form images. • How do images depend on these properties? • Two key elements • Geometry • Radiometry • We consider only simple models of these UCLA Vision Lab
Image formation (Chapter 3) UCLA Vision Lab
Representation of images UCLA Vision Lab
Similar triangles <P’F’S’>,<ROF’> and <PSF><QOF> UCLA Vision Lab
Pinhole model UCLA Vision Lab
Forward pinhole UCLA Vision Lab
Distant objects are smaller UCLA Vision Lab (Forsyth & Ponce)
Parallel lines meet Common to draw image plane in front of the focal point. Moving the image plane merely scales the image. UCLA Vision Lab (Forsyth & Ponce)
Vanishing points • Each set of parallel lines meets at a different point • The vanishing point for this direction • Sets of parallel lines on the same plane lead to collinear vanishing points. • The line is called the horizon for that plane UCLA Vision Lab
Properties of Projection • Points project to points • Lines project to lines • Planes project to the whole image or a half image • Angles are not preserved • Degenerate cases • Line through focal point projects to a point. • Plane through focal point projects to line • Plane perpendicular to image plane projects to part of the image (with horizon). UCLA Vision Lab
Orthographic projection UCLA Vision Lab
Cameras with Lenses UCLA Vision Lab (Forsyth & Ponce)
Assumptions for thin lens equation • Lens surfaces are spherical • Incoming light rays make a small angle with the optical axis • The lens thickness is small compared to the radii of curvature • The refractive index is the same for the media on both sides of the lens UCLA Vision Lab
Blur circle Points a t distance are brought into focus at distance is imaged at point A point at distance from the lens and so Thus points at distance will give rise to a blur circle of diameter with d the diameter of the lens UCLA Vision Lab
Interaction of light with matter • Absorption • Scattering • Refraction • Reflection • Other effects: • Diffraction: deviation of straight propagation in the presence of obstacles • Fluorescence:absorbtion of light of a given wavelength by a fluorescent molecule causes reemission at another wavelength UCLA Vision Lab
Refraction n1, n2: indexes of refraction UCLA Vision Lab
steradian (sr) dw q w dw = df sinq dq f Solid Angle hemisphere radian dq q Sphere: 4p UCLA Vision Lab
Radiometric Terms UCLA Vision Lab
Irradiance and Radiance Irradiance Definition: power per unit area incident on a surface [W/m2 = lux] Radiance Definition: power per unit area and projected solid angle [W/m2sr] UCLA Vision Lab
Radiant Intensity Definition: flux per unit solid angle : Radiant flux[W] [W/sr = cd (candela)] [ ] UCLA Vision Lab
Isotropic Point Source UCLA Vision Lab
Isotropic Point Source : Radiant flux[W] All directions: solid angle 4p • Radiant flux per unit solid angle [W/sr] r : Radiant intensity • Note inverse square law fall off. UCLA Vision Lab
Isotropic Point Source : Radiant flux[W] All directions: solid angle 4p • Radiant flux per unit solid angle [W/sr] r : Radiant intensity h • Note cosine dependency. UCLA Vision Lab
Isotropic Point Source Point source at a finite distance r h • Note inverse square law fall off. • Note cosine dependency. UCLA Vision Lab
Irradiance from Area Sources UCLA Vision Lab
Hemispherical Source L UCLA Vision Lab
Lr(x,w) Ei Reflectance The surface becomes a light source Li(x,wi) qi Ei dLr=fr dEi Reflectance: ratio of radiance to irradiance UCLA Vision Lab
BRDF UCLA Vision Lab
BRDF UCLA Vision Lab
Reflection Equation UCLA Vision Lab
qi LB(qr, fr) is constant for all directions (qr, fr) Perfectly Diffuse Reflection • Perfectly Diffuse Surface • Appears equally bright from all viewing directions (qr, fr) • Reflects all incident light, i.e., UCLA Vision Lab
qi Common Diffuse Reflection • Normal Diffuse Surface • Appears almost equally bright from most viewing • directions (qr, fr), qr << 90° • Reflects only a fraction of incident light, i.e., Reflectance : Albedo UCLA Vision Lab
qi Perfectly Diffuse Reflection Distant point light source Lambertian cosine Law UCLA Vision Lab
Law of Reflection UCLA Vision Lab
Perfectly Specular Reflection From the definition of BRDF, the surface radiance is: To satisfy: UCLA Vision Lab
Lambertian Examples Lambertian sphere as the light moves. (Steve Seitz) Scene (Oren and Nayar) UCLA Vision Lab
Lambertian + Specular Model UCLA Vision Lab
Lambertian + specular • Two parameters: how shiny, what kind of shiny. • Advantages • easy to manipulate • very often quite close true • Disadvantages • some surfaces are not • e.g. underside of CD’s, feathers of many birds, blue spots on many marine crustaceans and fish, most rough surfaces, oil films (skin!), wet surfaces • Generally, very little advantage in modelling behaviour of light at a surface in more detail -- it is quite difficult to understand behaviour of L+S surfaces (but in graphics???) UCLA Vision Lab
Lambertian+Specular+Ambient (http://graphics.cs.ucdavis.edu/GraphicsNotes/Shading/Shading.html) UCLA Vision Lab