Download
1 / 20
210 likes | 293 Views
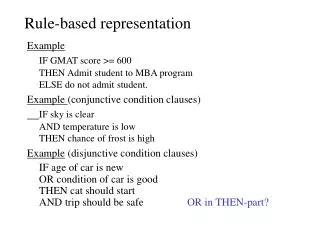
Integration of Representation Into Goal-Driven Behavior-Based Robots. By Dr. Maja J. Mataric` Presented by Andy Klempau. Introduction. Hybrid system separates reactive low level actions from deliberative decision actions. Alternative to Hybrid approach is Behavior-Based system.

E N D
Integration of Representation Into Goal-Driven Behavior-Based Robots By Dr. Maja J. Mataric` Presented by Andy Klempau
Introduction • Hybrid system separates reactive low level actions from deliberative decision actions. • Alternative to Hybrid approach is Behavior-Based system. • Behavior-Based system combines a reactive subsumption foundation with a decision maker. • Toto is a Behavior-Based robot that explores dynamic office environments, identifies landmarks, maps the landmarks, and uses the map for path planning.
Outline • Toto’s Structure • Basic Navigation ( Exploring ) • Landmark Detection • Mapping Landmarks • Path Planning
Toto’s Structure • Cylindrical Robot • 12 Sonar Sensors • 4 Bit Compass (16 states)
Basic Navigation • Subsumption Architecture • Highest priority is Stroll behavior • Lowest priority is Correct behavior
Basic Navigation Stroll :if( min( sonars 1 2 3 4 ) <= danger-zone ) if( not stopped ) stop else move backward else move forward
Basic Navigation Avoid : if( ( sonar 3 or 4 ) <= safe-zone ) turn left else if( ( sonar 1 or 2 ) <= safe-zone ) turn right
Basic Navigation Align :if( ( sonar 7 or 8 ) < edging-distance AND ( sonar 5 or 6 ) > edging-distance ) turn right if( ( sonar 9 or 10 ) < edging-distance AND ( sonar 11 or 0 ) > edging-distance ) turn left
Basic Navigation Correct : if( sonar 11 < edging-distance AND sonar 0 > edging-distance ) turn left if( sonar 6 < edging-distance AND sonar 5 > edging-distance ) turn right
Landmark Detection • 4 types of landmarks: • Right wall (RW); consistent right wall and consistent direction. • Left wall (LW); consistent left wall and consistent direction. • Corridor (C); consistent left and right walls and consistent direction. • Irregular (I); inconsistent walls and inconsistent direction. • How does Toto identify landmarks? Confidence Counter!
Landmark Detection • After a time interval, sonar and compass readings are taken. • Confidence Counter increments when sonar and compass readings are the same as last time interval. • Predetermined threshold identifies how many time intervals are needed to justify a landmark
Mapping Landmarks • After discovered, landmarks are stored in Toto’s internal map. • Landmark nodes store information discovered through sensors and compass (see next slide). • Nodes communicate with neighbors.
Mapping Landmarks • Landmark node has a set < T, C, L, P > where T is { LW, RW, C, I }; qualitative landmark type. C is [ 0 … 15 ]; averaged compass bearing. L is [ 1 … 127 ]; rough estimate of landmark’s length. P = ( x, y ) -128 <= x, y <= 127; coarse position estimate. • Length is obtained through timer (could be confidence counter). • Position is obtained through length and compass.
Mapping Landmarks • Example:
Path Planning • Use the map to go to a goal. • This is done by activating one of Toto’s previously visited landmarks as a goal.
Path Planning • Goal sends signal to neighbor nodes. • Eventually, all nodes know where goal is. • Greedy algorithm ensures Toto will take shortest path to goal. • Toto can go to goal starting from any landmark. • Toto can adapt to a changing environment.
Review • Explores • Finds landmarks • Stores landmarks in map • Goes to goal
Conclusion • Toto explores, maps, plans, and finds goals without Deliberative or Hybrid process. • Toto “extends the repertoire of integrated reactive systems to tasks requiring spatial modeling and user interaction.” • Toto can adapt to a dynamic environment.
Discussion • Is linear-time path planning reactive? • Can a Behavior-Based system do anything a hybrid system can do? • How is the open-space behavior triggered?