Download
1 / 25
250 likes | 322 Views
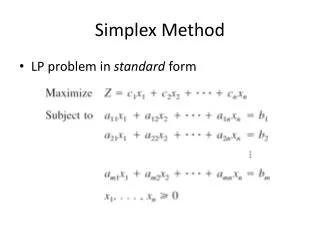
Soham Uday Mehta. CS 270, Spring 2013 Project A Visual TOOL FOR THE simplex method in LP. Linear Programming in 3 variables. Subject to. Goals. Visualize the convex feasible region specified by constraints (in 3D). Goals.

E N D
SohamUday Mehta CS 270, Spring 2013 ProjectA Visual TOOL FOR THE simplex method in LP
Linear Programming in 3 variables • Subject to
Goals • Visualize the convex feasible region specified by constraints (in 3D)
Goals • Visualize the convex feasible region specified by constraints (in 3D) • Visualize Simplex Algorithm to solve the LP (simple version)
Visualization • Each constraint becomes a polygon bounding the convex feasible region
Visualization • Each constraint becomes a polygon bounding the convex feasible region • Start with 3 Quads for • Assume we have all polygons for current convex region and we want to add a new constraint
Visualization • Each constraint becomes a polygon bounding the convex feasible region • Start with 3 Quads for • Assume we have all polygons for current convex region and we want to add a new constraint • Need to clip all polygons by new constraint
Visualization • Find the ‘side’ of plane each vertex of polygon is on • If an edge of poly cuts plane, add new vertex and remove the ‘wrong’ side vertex
Visualization • Each constraint may also create a new polygon
Visualization • Each constraint may also create a new polygon
Visualization • Each constraint may also create a new polygon • Store ‘new’ vertices created by clipping existing polygons
Visualization • Each constraint may also create a new polygon • Store ‘new’ vertices created by clipping existing polygons • Remove duplicates
Visualization • Each constraint may also create a new polygon • Store ‘new’ vertices created by clipping existing polygons • Remove duplicates, re-order vertices, and create new poly
Simplex Algorithm • Start with a random vertex
Simplex Algorithm • Start with a random vertex • Find extreme directions at current vertex • Pick maximum improvement direction • If no improvement in any direction, stop
Simplex Algorithm • Start with a random vertex • Find extreme directions at current vertex • Pick maximum improvement direction • If no improvement in any direction, stop • Find max. feasible step and move to next vertex • Go back to 2
Choosing the start vertex • First add 1 auxiliary variable to each constraint to convert it to an equation, create matrix • Randomly choose from the and set to , solve the equations for rest If matrix is not invertible or some , solve with different choice The ones set to zero are called non-basic, rest are basic – store this in a boolean vector “B”
Choosing the start vertex • First add 1 auxiliary variable to each constraint to convert it to an equation, create matrix • Randomly choose from the and set to , solve the equations for rest • If matrix is not invertible or some , solve with different choice • The ones set to zero are called non-basic, rest are basic – store this in a boolean vector “B”
Finding directions at any vertex • Each non-basic variable gives a direction For , set 1 non-basic value to 1, other two to 0 and solve for rest (free upto a constant) Pick direction which gives maximum If all directions give , reached maximum, STOP
Finding directions at any vertex • Each non-basic variable gives a direction • For , set 1 non-basic value to 1, other two to 0 and solve for rest (free upto a constant) • Pick direction which gives maximum • If all directions give , reached maximum, STOP
Finding the next vertex • Choose step size • Move to next vertex
Finding the next vertex • Choose step size • Move to next vertex • Update “B” vector to correspond to new vertex: non-basic generating the max direction becomes basic, the basic fixing becomes non-basic
Conclusion • Will be available for download
Conclusion • Will be available for download • Thanks for your attention • Comments / Questions?