Download
1 / 13
130 likes | 244 Views
Introduction to Self-Organization. Ari Requicha Professor, CS and EE Founding Director, Lab for Molecular Robotics University of Southern California http://www-bcf.usc.edu/~requicha. Motivation. Nanorobots will be very small Single robots will have limited capabilities.

E N D
Introduction to Self-Organization Ari Requicha Professor, CS and EE Founding Director, Lab for Molecular Robotics University of Southern California http://www-bcf.usc.edu/~requicha
Motivation • Nanorobots will be very small Single robots will have limited capabilities. • Large numbers of nanorobots will be needed for achieving significant goals. • How should systems of such robots be designed and programmed? • Can we learn from nature?
Very Large Distributed Autonomous Systems • Coordinated behavior: cooperation among many simple agents. • Adaptive behavior: flexible and robust wrt external changes and internal perturbations. • Lack of central control: no supervision. • Self-organization: complex global behavior emerges from simple local interactions between agents or agents and the environment. • Our biases: • Construction of spatial patterns/shapes. • Active systems such as robots or biological cells, not passive such as molecules.
Requirements for Self-Organization • Positive feedback - amplification of fluctuations • random walks • errors • instability • Negative feedback - system stabilization • saturation • exhaustion • competition • Multiple interactions among components
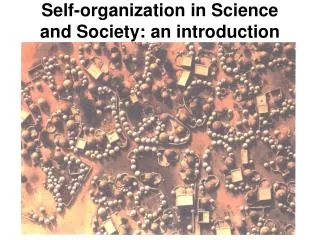
Characteristic Properties of Self-Organization • Emergence of spatio-temporal patterns in an initially homogeneous medium. • Multiple stable states (attractors). • Bifurcations: sudden transitions due to small changes in parameters or initial conditions. Self-organization is ubiquitous in nature: crystals, clouds, shells, ... Studied in Physics, Chemistry, Biology, ... Self-assembly is an interesting aspect, now being studied in Nanotech, CS, ...
Animal Patterns www.scottcamazine.com
Botanical Patterns www.scottcamazine.com
Physical Patterns www.scottcamazine.com
Modeling Self-Organization Phenomena • Nonlinear differential equations. • Simulation. • Cellular automata (similar to “game of life”).
Example: Logistic Equation Population model for organisms with non-overlapping generations. • Nt = population at time (generation) t • r = reproductive factor (~ how many children an individual has) • Maximum population possible in the given environment = 1 • Population [0, 1] • Assumptions: population grows linearly with the number of individuals while there are few; when the upper limit is approached, growth tapers down to 0. • Equation: Nt+1 = r Nt (1 - Nt)
Behavior of the Logistic Equation • r < 1 N 0 • 1 < r < 3 N Const • 3 < r < 3.4 Oscillation between 2 Attractors • 3.4 < r < 3.57 Oscillation between 4 Attractors • r > 3.57 Chaotic behavior
Coordination Mechanisms • Self-organization. • Response thresholds: Stimulus > Threshold Behavior. • Environmental patterns (“templates”, heterogeneities): Pattern Behavior. • Stigmergy: environment pattern is created by the agents.
Some Issues • Coordination algorithms. • Programming: What local rules are needed to achieve the desired global behavior? “Global-to-local compilation”. • Communication requirements. For ants: chemical cues, at very short distances (usually contact). For nanorobots? • Role of randomness. • Performance evaluation • How to include in optimization criteria robustness and adaptation? • How to assess systems that depend on a multitude of parameters?