Download
1 / 25
320 likes | 686 Views
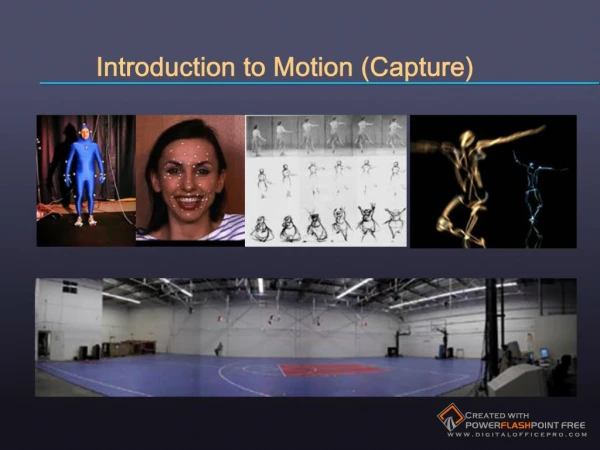
Motion Capture: Introduction. Rama Hoetzlein, 2011 Lecture Notes Aalborg University at Copenhagen. History of Motion Capture. goniometer. 1980 Simon Fraser University Electrogoniometer – directly, and electrically measure angles in space. T. W. Calvert, J. Chapman and A. Patla.

E N D
Motion Capture:Introduction Rama Hoetzlein, 2011Lecture NotesAalborg University at Copenhagen
History of Motion Capture goniometer 1980 Simon Fraser UniversityElectrogoniometer – directly, and electrically measure angles in space T. W. Calvert, J. Chapman and A. Patla. Aspects of the Kinematic Simulation of Human Movement. Simon Fraser University
Inputenvironment Systemmodel Outputenvironment
1983 Graphical Marionette, Carol Ginsberg and Delle Maxwell, MiT1984 Brilliance, Robert Abel 18 joints, with markersrotating chair to maintain stationary cameravisually tracked on every frame http://deneroff.com/blog/2010/03/09/oh-motion-capture-what-art-thou/
1988 Waldo device, Jim Henson Productions A waldo is an electronic telemetric input device Muppeteers use to remotely perform characters. Shaped like a Muppet's head, the waldo sends radio signals to a mechanism in the puppet that moves the puppet's mouth in sync with the waldo's mouth.
Waldo C. Graphic (character) The term "waldo" comes from a 1942 novella written by science-fiction author Robert A. Heinlein. In the novella, a disabled scientist named Waldo builds a robot to amplify his limited abilities.
1988 B. Robertson, Mike the Talking Head, Computer Graphics World 11 (7):57Scanned head of Mike Gribble. 256,000 data pointsMike is re-scanned as he speaks different words.
1992 Steam, Peter Gabriel music video Stephen Johnson, Director http://vodpod.com/watch/5590663-peter-gabriel-steam-making-of-video
Motion Capture in Film Futureworld, 1973 - Very brief, few second clip. Manually tracked.
1993, Total Recall, Paul Verhoeven (Director)First attempt a optical motion capture in film, failed. Instead, studio rotoscoped CGI characters to videos of markers.
Steve Williams – Animation from painted reference models. 1991 Terminal 2: Judgement Day, James Cameron (Director) First CGI as main character. Industrial Light & Magic.Inspired by technology of the Abyss. 6 seconds total of full CGI. 3.5x cost of other films. http://www.cgchannel.com/2010/04/the-making-of-terminator-2/
1992Lawnmower man First successful use of optical body-motion capture suit. See also: The Mind’s Eye, series of experimental films by Odyssey Visual Design
2001-2003 Lord of the Rings, Peter Jackson (Director)Gollum character. Acted by Andy Serkis. Passive optical motion capture.For some of Gollum's scenes, an actor named Andy Serkis (who provided Gollum's voice throughout the trilogy) put on a motion-capture suit and played the part. Andy's motion drove the movement of Gollum's body in the movie. In other scenes, the animators used key-frame animation to control Gollum's body. In all of the scenes, they used key-frame animation to move Gollum's face.
2001 Final Fantasy: The Spirits Within, Hironobu Sakaguchi (Director)Square Studios. Four Onyx2 mainframes, 167 Octane workstations. (Hawaii)960x Pentium III 933 mHz workstations. 15 terabytes. “I think its OK to look at Aki and be convinced that she’s human. Each of her 60,000 hairs was separately and fully animated and rendered.”
Point at which a non-human character, increasing in realismsuddenly feels very unnatural. Term from Masahiro Mori, 1970’s roboticist.
2004, Polar ExpressBody motion capture.Multiple characters by Tom Hanks Motion capture must address the Uncanny valley.
2004 King Kong, Peter Jackson (Director)Acted by Andy Serkis (again).50 cameras used for body. 20 cameras just for the face. http://unrealitymag.com/index.php/2010/07/06/video-clips-of-andy-serkis/
Motion Picture effects historyAdditional resources:Huge collection of special effects used in motion pictures,with color images.Filmsite, Greatest Visual and Special Effects Milestones in Film 20 part, online article http://www.filmsite.org/visualeffects.html
Motion Capture Basics One camera is not sufficient to record depth.
Motion Capture Basics Two views can uniquely determine a 3D point in space.Intersection of lines in space through the image points gives three dimensional position of the marker.
Two input images: r0 p0 p0 c0 p1 Camera 0 Camera 1 V = view transformM = model transformP = projection transform p’ = PVM p Problem: Given p’, image space point, what is p, the original 3D position? -1 -1 -1 p = P V M p’ -1 1) Assume model is identity (world space). M = M = identity2) Must known camera orientation V in advance. V V is a rotation matrix. Inverse of a rotation matrix is its transpose. V = V 3) Must also known projection matrix, camera field of view.4) p’ is under-determined. Depth is not known. p’ = {x, y, cnear }5) Construct a ray r0 going through p0. The origin of the ray is camera center c0. Answer must lie along this ray.6) Use ray of other camera r1, to uniquely determine where along r0.7) Line intersection of ray r0 and r1. -1 T
p V1 V2 P1 P2 P1 = camera origin c0P2 = camera origin c1V1 = camera ray r0V2 = camera ray r1 t = parametric distance p = solution point
Motion Capture is sensitive to error Assume d = 3 meters (camera distance to marker)Assume camera = 640 pixelsAssume field of view = 42 degsThen error is:e = d tan ( ang )ang = 42 / 640 = 0.065 degrees / pixele = 3 * 0.001145e = 0.003145 meterse = 3.145 millimeters per pixel If camera distance (d) doubles… Error e doublesIf camera resolution is halved… Error e doublesIf pixel error doubles… Error e doubles Error is compounded with multiple cameras.. creating an error volume.
Quick lab:Determine the spatial error for the following setup:A camera is located 5 meters from a marker.The camera is high resolution, 1024 pixels across.The camera has a field of view of 60 degrees, wide angle.Due to light interference, the pixel error is = 2 pixels.Due to incorrect calibration, another 6 pixels of error is added. What is the spatial error of the marker? What is the spatial error if the calibration was correct? Advanced:If there are two cameras at right angles,and their pixel error is both 2 pixels,and they are both 5 meters from the marker,both with FOV = 60 and Resolution = 1024What is the minimum spatial error?