Download
1 / 15
171 likes | 464 Views
Coordinate Systems. By: Chris Dalton. Key Ideas . 3-dimensional movement can be described by the use of 6 Degrees of Freedom 3 translational Degrees of Freedom 3 rotational Degrees of Freedom What are Degrees of Freedom?

E N D
Coordinate Systems By: Chris Dalton
Key Ideas • 3-dimensional movement can be described by the use of 6 Degrees of Freedom • 3 translational Degrees of Freedom • 3 rotational Degrees of Freedom • What are Degrees of Freedom? • “The number of independent variables that must be specified to define completely the condition of the system” • Purpose of a coordinate system • To quantitatively define the position of a particular point
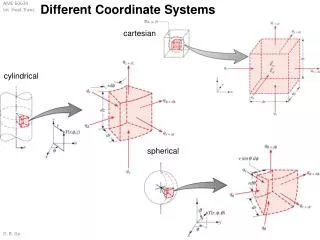
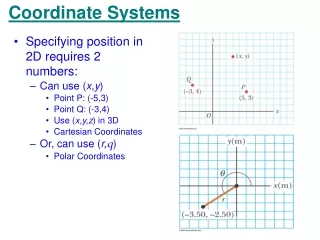
Motion in 2-Dimensions • In planar motion • There are two ways to report 2-D motion • Cartesian coordinates • Polar coordinates • In space • A way to determine the position of a body in space
Coordinate Systems • Coordinate systems are generally: • Cartesian • Orthogonal • Right-Handed • Purpose: • To quantitatively define the position of a particular point or rigid body
Cartesian Coordinate Systems • Purpose: used to establish a Frame of Reference • Generally, this system is defined by 2 things: • An origin: 2-D coordinates (0,0) or 3-D location in space (0,0,0) • A set of 2 or 3 mutually perpendicular lines with a common intersection point • Example of coordinates: • 2-D: (3,4) – along the x and y axes • 3-D: (3,2,5) – along all 3 axes
Orthogonal • Definition: • Refers to axes that are perpendicular (at 90°) to one another at the point of intersection
Right-Handed Rule • Coordinate systems tend to follow the right-hand rule • This rule creates an orientation for a coordinate system • Thumb, index finger, and middle finger • X-axis = principal horizontal direction (thumb) • Y-axis = orthogonal to x-axis (index) • Z-axis = right orthogonal to the xy plane (middle)
Global Coordinate Systems • A reference system for an entire system. When labelling the axes of the system, upper case (X, Y, Z) may be useful in a GCS • Example – a landmark from a joint in the body (lateral condyle of the femur for the knee joint) • Within a global coordinate system, the origin is of utmost importance • Using a global coordinate system, the relative orientation and position of a rigid body can be defined. Not only a single point.
Local Coordinate Systems • A reference system within the larger reference system (i.e. LCS is within the GCS) • This system holds its own origin and axes, which are attached to the body in question • Additional information: • Must define a specific point on or within the body • Must define the orientation to the global system • Origin and orientation= secondary frame of reference (or LCS)
Joint Coordinate Systems • A reference system for joints of the body in relation to larger GCS(the whole body) and to other body segments (LCS) • Purpose • To be able to define the relative position between 2 bodies. • Relative position change = description of motion • Orientation • Origin • Could be the centre of mass of a body segment (ex. The thigh) • Could be the distal and proximal ends of bones
Euler Angles • Purpose: • A method used to describe 3-dimensional motion of a joint • `Represent three sequential rotations about anatomical axes` • Important to note about Euler angles is that they are dependent upon sequence of rotation • Classified into two or three axes
Standard Euler Angles and Euler Angle of JCS • Sequence dependency differs depending on which system is being looked at in order to describe 3-dimensional rotation about axes • Standard Euler Angles: • Dependent upon the order in which rotations occur • Classified into rotations about 2 or 3 axes • Euler Angle in a Joint Coordinate Systems: • Independent upon the order in which rotations occur • All angles are due to rotations about all 3 axes
Application of Joint Coordinate Systems to the Knee • The knee joint focuses on tibial and femoral motion • First, need to establish your Cartesian coordinate system • Second, want to determine a motion of interest for each bone • Third, want to determine the perpendicular reference direction • Last, complete the system using the right-handed rule
The End Questions?
References • Grood, E.S. & Suntay, W.J. (1983). A Joint Coordinate System for the Clinical Description of Three- Dimensional Motions: Application to the Knee. Journal of Biomechanical Engineering, 105. 136- 144. Retrieved from http://www.biomech.uottawa.ca/english/teaching/apa6905/lectures/2012/Grood%20and%20Suntay%201983.pdf • Karduna, A.R., McClure, P.W., & Michener, L.A. (2000). Scapular Kinematics: Effects of Altering the Euler Angle Sequence of Rotation. Journal of Biomechanics, 33. 1063-1068. doi. 10.1016/S0021-9290(00)00078-6 • Mantovani, G. (2013, September). 3-D Kinematics. Lecture conducted from University of Ottawa, Ottawa,ON. • Pennestri, E., Cavacece, M., & Vita, L. (2005). Proceedings from IDETC’05: ASME International Design Engineering Technical Conference and Computers and Information in Engineering Conference. Long Beach, California. • Robertson, Gordon E. (2004). Introduction to Biomechanics for Human Motion Analysis: Second Edition. Waterloo: Waterloo Biomechanics • Roberston, G.E., Caldwell, G.E., Hamill, J., Kamen, G., & Whittlesey, S.N. (2004). Research Method in Biomechanics: Second Edition. Windsor: Human Kinetics. • Routh, Edward J. (1877). An Elementary Treatise on the Dynamics of a System of Rigid Bodies. London: MacMillan and Co. • Zalvaras, C.G., Vercillo, M.T., Jun, B.J., Otarodifard, K., Itamura, J.M., & Lee, T.Q. (2011). Biomechanical Evaluation of Parallel Versus Orthogonal Plate Fixation of Intra-Articular Distal Humerus Fractures. Journal of Shoulder and Elbow Surgery, 20. 12-20. doi. 10.1016/j.jse.2010.08.005