Download
1 / 46
510 likes | 814 Views
Empirical Modeling and Controller Design. Topics in this talk:. Non-parametric methods for modeling the process for PID controller design --- Simple reduced order models in the form of FOPDT (first order plus dead time) or SOPDT (second order plus dead time)

E N D
Empirical Modeling and Controller Design
Topics in this talk: • Non-parametric methods for modeling the process for PID controller design ---Simple reduced order models in the form of FOPDT (first order plus dead time) or SOPDT (second order plus dead time) • Optimization-based PI/PID controllers • IMC controllers • Inverse-based design for PI/PID controllers • Auto-tune
Non-parametric methods for modeling • Development of FOPDT model from step response cirve. • Development of SOPDT model from step response cirve. • Development of FOPDT model from auto-tuning variations
Model characterization by reaction curve • FOPDT (First Order Plus Dead Time) model • Fit 3
Simple Second order Models from Reaction Curve Dimensionless form Ind. Eng. Chem. Res. 2001, 40, 1903-1915 A System of Procedures for Identification of Simple Models Using Transient Step Response
The value of tp,1-θ is taken as tp,1-tm,0. The criterion to determine if : tp,1-tm,0 = tp,2-tm,1.
SOPDT models for non-oscillatory over-damped step responses Step 1The step response test Step2 Finding Calculate R(0.5) and R(0.9). Then use the equations: Step 3 use the following equations to compute
Journal of Process Control 15 (2005) 713–727 Auto-tune system using single-run relay feedback test and model-based controller design • Estimation of process gain kp • Start the ATV test with a temporal disturbance to setpoint or process input • Define • and have cycling responses
Estimation of Apparent Deadtime • In an ATV test, two measured quantities are used to characterize the effect of the apparent deadtime • For SOPDT process, this two quantities are functions of and
Algorithm for estimation of apparent deadtime • Starting from a guessed value of • Calculate and , and feed them into networks to compute and • Check if the eq. holds • If not, increase the value of until the above eq. holds. At that time, is the estimated apparent deadtime
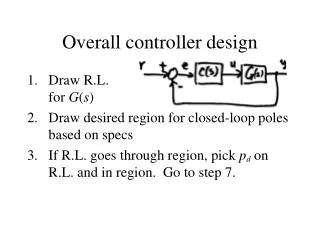
Model-based Methods --- Optimization-based --- IMC --- inverse-based
Optimization-based design using reaction curve • FOPDT (First Order Plus Dead Time) model • Fit 3
Integral performance indices • ISE : • IAE: • ITSE: • ITAE:
Model based tuning rules for optimal integral performance measures ---II • Optimal tuning parameters are obtained via simulating a basic loop: • The results apply specifically to set-point change or to disturbance change. GL=GP
Model based tuning rules for optimal integral performance measures ---III • The resulted tuning parameters are fitted into the following forms: • The values of a and b are tabularized.