Download
1 / 1
10 likes | 103 Views
Research project explores AIBO robot's suitability for artificial physics, Python programming module, odometry data testing, and error analysis. Results indicate limitations and challenges faced.

E N D
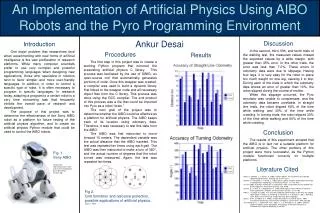
An Implementation of Artificial Physics Using AIBO Robots and the Pyro Programming Environment Ankur Desai Discussion In the second, third, fifth, and tenth trials of the walking test, the measured values missed the expected values by a wide margin, with greater than 35% error. In the other trials, the error was less than 7.0%. These errors in odometry data were due to slippage. Having four legs, it is very easy for the robot to place too much weight on one leg, causing it to slip. During each of the trials in which the odometry data shows an error of greater than 10%, the robot slipped during the course of motion. When this slippage occurred, the Pyro simulator was unable to compensate, and the odometry data became unreliable. In straight line trials, the robot slipped 60% of the time while walking and 40% of the time while crawling. In turning trials, the robot slipped 30% of the time while walking and 60% of the time while crawling. Conclusion The results of this experiment showed that the AIBO is in fact not a suitable platform for artificial physics. The other portions of this project were more successful, as the Python module functioned correctly on multiple platforms. Introduction One major problem that researchers face when experimenting with new forms of artificial intelligence is the vast proliferation of research platforms. While many computer scientists prefer to use very complex and powerful programming languages when designing new applications, those who specialize in robotics tend to favor simpler and more user-friendly languages. In addition, in order to control a specific type of robot, it is often necessary to program in specific languages. In research today, adapting a program to a certain robot is a very time consuming task that frequently inhibits the overall pace of research and development. The purpose of this project was to determine the effectiveness of the Sony AIBO robot as a platform for future testing of the artificial physics algorithm, and to create an artificial physics Python module that could be used to control the AIBO robots. Procedures The first step in this project was to create a working Python program that mirrored the preexisting artificial physics C library. This process was facilitated by the use of SWIG, an open-source tool that automatically generates portions of code. Once this wrapper was created, a compiler was used to build a dynamic library that linked to the wrapper code and all necessary object files from the C library. This process was done using the GCC compiler. The end product of this process was a file that could be imported into Pyro as a robot “brain.” The next goal of the project was to determine whether the AIBO could be effective as a platform for artificial physics. The AIBO keeps track of its location using odometry data. Therefore, it was necessary to test this data from the AIBO. The AIBO was first instructed to move forward 10 meters. The dependent variable was the actual distance that the AIBO traveled. This test was repeated ten times using each gait. The AIBO was then instructed to make a turn of 360°, and the actual number of degrees that the robot turned was measured. Again, the test was repeated ten times. Results Fig. 1. Sony AIBO (Image from http://www.cifrovik.ru/cifrovik/services/catalog/images/14077-photo-medium.jpg) Literature Cited Blank, D., Meeden, L., & Kumar, D. (2003). Python robotics: An environment for exploring robotics beyond LEGOs. SIGSCE ’03, 35, 317-3121. Ikemoto, Y., Hasegawa, Y., Fukuda, T., & Matsuda, K. (2005). Gradual spatial pattern formation of homogeneous robot group. Information Sciences, 171, 431-445. Lee, M. (2003). Evolution of behaviors in autonomous robot using artificial neural network and genetic algorithm. Information Sciences, 155, 43-60. Oliveira, E., Fischer, K., & Stepankova, O. (1999). Multi-agent systems: Which research for which applications. Robotics and Autonomous Systems, 27, 91-106. Röfer, T., & Jüngel, M. (2003). Fast and robust edge-based localization in the Sony four-legged robot league. In Polani, D., Browning, B., Bonarini, A., & Yoshida, K. (Eds.), RoboCup 2003: Robot soccer world cup VII (pp. 262-273). Berlin: Springer. Spears, W. M., & Gordon, D. F. (1999). Using artificial physics to control agents. 1999International Conference on Information Intelligence and Systems, 1999, 281-288. Tira-Thompson, E. J., Halelamien, N. S., Wales, J. J., & Touretzky, D. S. (2004). Tekkotsu: Cognitive robotics on the Sony AIBO. Proceedings of the Sixth International Conference on Cognitive Modeling, 6, 390-391. Fig 2. Grid formation and resource protection, possible applications of artificial physics. (Spears, 1999)