Download

1 / 24
240 likes | 310 Views
PSF reconstruction for the MUSE-Galacsi GLAO mode. Concept, validation in simulation and on sky-tests using Gems. T. Fusco 1,2 , R. Villecroze 1,3 , B. Neichel 2 , R. Bacon 3 , P-Y Madec 4 , M. Lelouran 4 , A. Guesalaga 5 1 ONERA-DOTA, 2 LAM, 3 CRAL, 4 ESO, 5 Catolica Univ.

E N D
PSF reconstruction for the MUSE-Galacsi GLAO mode. Concept, validation in simulation and on sky-tests using Gems T. Fusco1,2, R. Villecroze1,3, B. Neichel2, R. Bacon3, P-Y Madec4, M. Lelouran4, A. Guesalaga5 1ONERA-DOTA, 2LAM, 3CRAL, 4ESO, 5 Catolica Univ. thierry.fusco@onera.fr
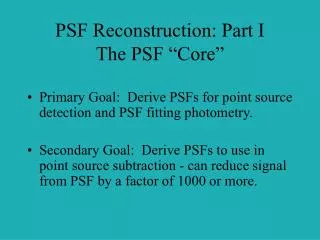
The global strategy • Top Level requirements • The PSF reconstruction scheme • Validations with E2E simulation • Error budget & approximations • Validation using GEMs on-sky data
The global strategy ESO GALACSI development Post processing expert Impact of PSF shape on extracted parameters (scientific relevant data) System parameters data data CRAL / LATT spec AO expert Simulation PSF estimation Astronomers Data analysis spec on PSF estim CRAL ONERA
NGS LGS1 αNGS αLGS1 γNGS γLGS Fov X axis (reference axis) γo αo Object of interest LGS4 MUSE Wide Field Problem geometry LGS2 LGS3
¨PSF model: Gaussian / Moffat function Gaussian Model Moffat Model
Science requirements: Analysis • Deconvolution • Using study for LTAO. • PSF errors impact is limited. • Lower precision PSF can be used as a starting point for myopic deconvolution • QSO fields • Search for faint diffuse emission around QSO • 10% accuracy in FWHM & beta is ok for faint QSO • Required accuracy too high for bright QSO, other methods to be used • Crowded stellar fields • Extract faint punctual source in crowded field • Accuracy of 5% (goal 1%) in FWHM and 10% (goal 2%) in beta
Science Requirements • The PSF will be modeled by an asymmetric Moffat function. • Moffat parameter estimation (MPE) will be done for each MUSE channel (field of view and wavelengths. • The MPE will include MUSE static aberrations and CCD PSF. • The MPE will also include the impact of atmospheric dispersion. • The MPE has to be possible using AOF data only. • The MPE estimation should include the wavelength dependencies with the whole MUSE spectral bandwidth. • The MPE should be compatible with a joint estimation using AOF data and PSF extracted from the scientific 3D images. • The MPE accuracy should be better than 5% in FWHM and 10% in beta parameter (in average over the MUSE field of view and the MUSE spectral bandwidth) for GLAO typical observation condition. • Error estimate in each MPE should be provided. • The MPE will cover a whole MUSE exposure time. MPE results will be attached to MUSE scientific data. • The procedure developed for MUSE WFM should be compatible with future NFM developments (as much as possible).
Global OPD structure function • Considering the "classical" error items for a GLAO system, the final OPD (optical path difference) structure function • Since GALACSI GLAO is performed using a combination of multi LGS and one NGS, the final structure function can be re-written as • And these terms can be decompose as :
Error budget – approximation • We show with the computation of the variance of all this term that , and are negligible comparing to and • The terms take into account in the OPD structure function will be only the anisoplantism and fitting terms • Finally the equation can be written as : Comparison of "typical" (for typical atmospheric conditions) residual variance per item of the error budget in the case of MUSE GLAO in the case of LGS. Note that the fitting variance is equal to 1 rad² Comparison of "typical" (for typical atmospheric conditions) residual variance per item of the error budget in the case of MUSE GLAO in the case of NGS. To be compared with the full TT turbulent variance: for 1.1" (L0= 25m) = 146 rad² and for 0.5" (ground layer corrected and L0=25m) = 41 rad²)
OPD structure function • Assuming that we have a 4 LGS system + an off-axis faint natural GS (measuring the Tiptilt), we define the residual phase after GLAO correction: • And the OPD structure function definition : • We can write : Tip Tilt correction with NGS Anisoplanetism correction with LGS Fitting term no corrected
The Vij basis (Gendron-06) • The goal is to reduce the computation time of the Uij basis. • This solution is based on Eric Gendron’s work • The idea is simply to perform a basis transformation where His a diagonal matrix that contains the {hi}=1...N eigenvalues and B is the matrix of eigenvectors: = Id. • Now we can compute the Zernike mode in the new basis: • And then compute the new basis
E2E validation • Use of a full E2E model developed at ONERA (multi LGS + NGS) • Validation of the algorithm itself (no model error) • Error budget analysis • validation of the various approximation • requirement on input parameters accuracy • Cn² profile (2 layers) • R0 and L0
Impact of the NGS position • The Ensquared Energy is very close between the RPSF and the E2E • The FWHM comparison, more chaotic beacause more sensible to the number of iterations, are still on the same way • The full analytical developments have been validated using an End2end model in its "simplified" version
Impact of the Seeing error • Done with the Cn² repartition at [40,60][%] • Linearity between Error on Seeing estimation (from 5 to 10%) and Errors on FWHM and EE
Validation with real data GEMS data ! 2 runs Four long exposure images Four quandrant in each image First analysis of the Data Data reduction bcksubstraction, sky, flat … map reconstruction from data PSF extraction Non-saturated PSF « single » single (no other stars in 1’’x1’’) Avoid halo of verybright stars => Not somuchtargets ! IV III II I Extraction of 24 PSF for the RUN1 and 27 PSF for the RUN2 18
Validation with real data • Estimation of the Cn² profile and the Seeing (example RUN1) • Estimation of the Seeing from r0 and variances • Estimation of the Cn² profile with Guesalaga & Cortes method
Validation with real data • Computation of the FWHM and EE and comparison with the RPSF • RPSF are computed with: • the Seeing estimated • Cn² profil estimated. • Arbitrairy outer scale (25m)
FWHM & EE – Run 1 FWHM computed using gaussian fit Error on EE Seeing adjustement AvgErr < 2 % RMS Err < 5% Correlation ~ 90%
FWHM & EE – Run 2 FWHM computed using gaussian fit Error on EE Seeing adjustement AvgErr < 3 % RMS Err < 7% Correlation ~ 80%
Conclusions • RPSF model (and approximations) fullyvalidatedwith • End2end model (MUSE case) • Experimentalresults (Gems case) => Assuming the Cn² profile and seeing are perfectlyknown, the error on critical PSF paramaters (for astronomers) isbelow a few % • In both cases it has been shownthat the mostcritical input parameters are • The global globalseeing • The Cn² repartition • Both of them are closelyrelated and finaly on candefinetwoparameterswhich have the strongest influence on RPSF results • groundseeing • altitude seeing => Both of them have to bedeterminedwith an accuracy of a few % since the error propagation on FWHM and EE for thesetwoparametersisbetween 1 and 2 !
How RPSF can efficiently work on sky ? • Required a period of on-skycalibration • Choice of an appropriate star field (not to crowded, good SNR, covering the wholeFoV) • Observation of the Star Field (hopefully in variousatmospheric conditions) • Images • RTC data => estimated Cn² and r0 • RPSF reconstruction and adjsutement of Cn² and seeing if required • Depending on the results : • Adjustsment of Cn² and seeingestimator (scalingfactors , fudgefactors) • Adjustmentof RPSF algo • Required time : a few images during the night and a few nights • Check on the star fieldduringregularoperationactivities (frequencydepends on the need of adjustment and the sensitivity of the turbuluence monitor algo) • allows a verification of RPSF perfromance and potentialfindadjustement if needed.